鳥のロボットを作ることだけを仕事にしている研究者が世の中にいるというのは、素晴らしいことだと思いませんか? それがこの研究室の目標であることは間違いありません。 つかみ爪を装備 近くの枝や指で休ませることができます。これにより、より実用的なツールになる可能性があります。
飛行が時間とともに進化し、羽ばたき翼を利用するのには十分な理由があります。たとえば、羽ばたき翼は、ローターやジェット機よりも鳥や昆虫にとってはるかに簡単に成長します。 エレガンスは自然のデザインの特徴であり、翼のある生き物は最小限のエネルギーと非常に優雅な状態で飛行または滑空します。
科学者が何十年もの間、翼のある羽ばたき飛行をロボットの形で再現しようと苦労してきたことは驚くべきことではありませんが、すべてのバイオミメティクス研究と同様に、さまざまな成功を収めています. しかし、スイスの有名な工科大学の 1 つである École Polytechnique Fedérale de Lausanne とセビリア大学は非常にうまくやっています。
ヨーロッパの多機関 GRIFFIN プロジェクトは、最初に認めさせてください、私がこれまでに遭遇した中で最も大げさなバックロニムを持っており、私は多くのことに遭遇しました。 . なんてこった!
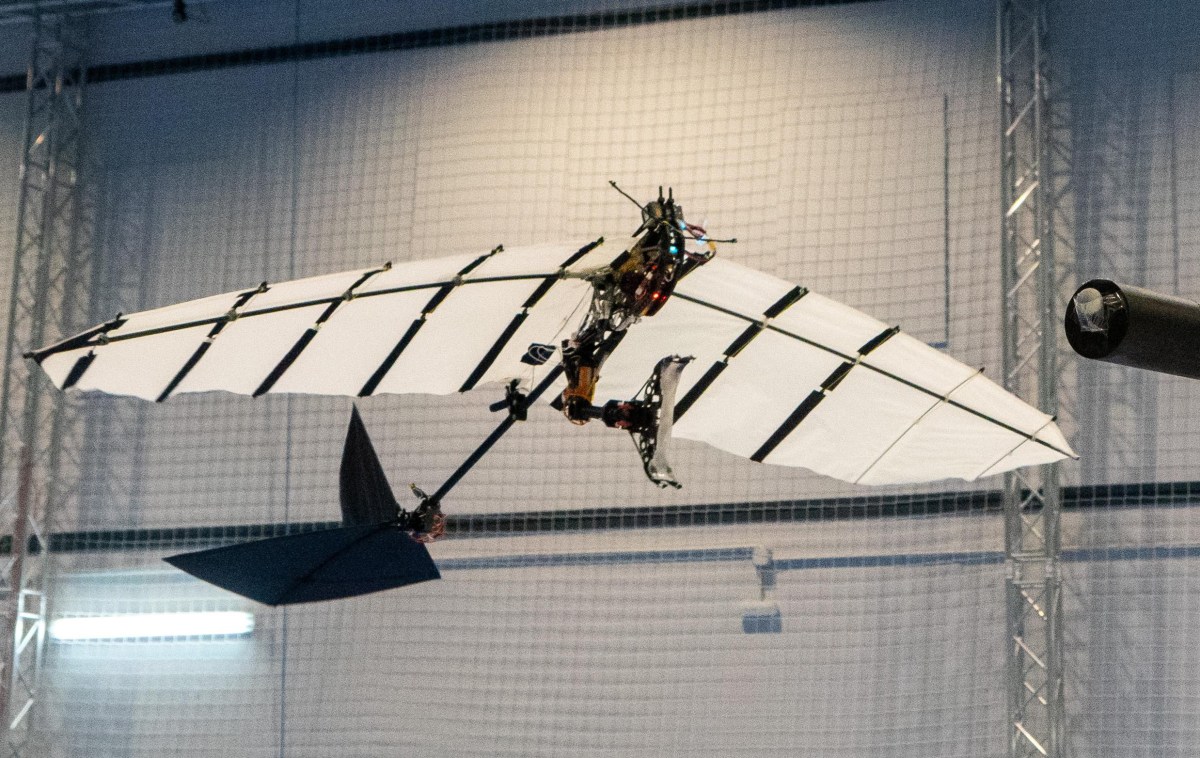
プロジェクトの有翼飛行は何年もの間進行中であり、さまざまな成功が記録されています。 プロジェクトの YouTube ページ と サイト. あなたはそれが飛び回っているのを見ることができます この最近のビデオ.
しかし、多くの飛行と同様に、この方法の問題はエネルギーです。 十分な電力がなく、長時間飛行することはできませんが、バッテリーが大きすぎると、まったく飛行できません! (ちなみに、これはワシが家畜を運び去ることへの新たな敬意をもたらします。) 研究室では、サイズと容量の間でバランスを取る必要があります。 しかし、最近追加されたつかみ爪は、その懸念を軽減するのに役立つ可能性があります.
画像クレジット: EPFL/ラファエル・ザフリー
オーニソプターの残りの部分と同様に、爪 (重量を節約するために 1 つだけ) は、強くて軽く、さまざまなサイズの止まり木をつかみ、GRIFFIN の知覚エンジンと通信して機能する必要がありました。 彼らが設計したものは、羽ばたきの動きと同期し、最初の接触として一種のシリコン バンドを備えたそのデザインは、ロボットを不快にさせずに、柔らかくしっかりとグリップします。
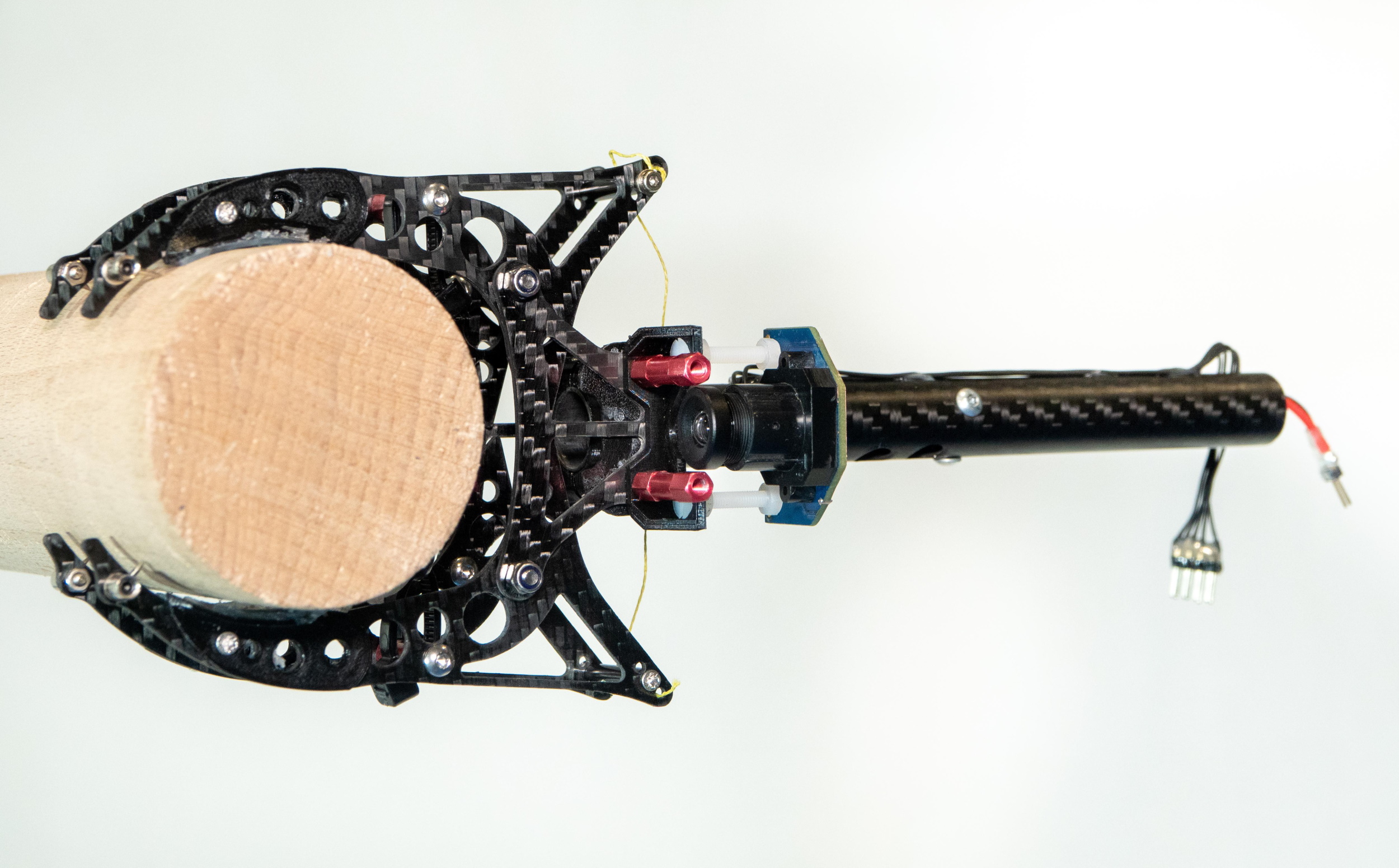
そこに指を入れないでください。 画像クレジット: EPFL/ラファエル・ザフリー
「オーニソプターが木の枝に自律的に着陸できるようになると、目立たないように生物学的サンプルを収集したり、木から測定したりするなど、特定のタスクを実行できる可能性があります。 最終的には、人工構造物に着地することさえでき、さらに応用分野が広がる可能性があります」と、EPFL のポスドク研究員で、現在セビリアで GRIFFIN に取り組んでいる Raphael Zufferey 氏は述べています。
ブランチに着陸して何かを実行できるというだけではありません。 それは、表面に戻る必要がないということです。 地上から 10 メートルの高さまで移動するためだけにエネルギーの半分を使用している場合は、実際にできることは限られます。 しかし、枝に着陸できる場合は、少し充電して (そこに小さな太陽電池を置いてみませんか?)、写真やサンプルを撮るなどの作業を行ってから、途中の別の枝に飛び乗って同じことを行います…それは技術デモのようには見えなくなり、有能なロボットの鳥のように見え始めます.
Zufferey 氏は、これらの方針に沿って開発を続けたいと考えています。 グリッパーは、プロジェクトの可能性を広げます。 ハチドリにインスパイアされたドローン、トンボにインスパイアされたドローン、ハチにインスパイアされたドローンでさえ、さまざまな目的で開発されており、さまざまな準備段階にあります。 「鳥は本物ではない」という人たちに、そのことを言わないでください。