
今日の自動車業界で最も競争が激しい分野の 1 つは、先進運転支援システム (ADAS) と自動運転の分野であり、どちらも安全性を大幅に向上させる可能性があります。
これらの技術に基づいて、完全に自動化されたレベル 5 の自動車は、ドライバーに賃金を支払う必要性をなくすロボット タクシーのフリートや、従業員が自宅で仕事をしたり休んだりできるようにするなど、革新的な経済的または生産性の利点を提供できます。車。
自動車メーカーは現在、これらの ADAS と自動運転システムに対する 2 つの主要なアプローチをテストしています。暫定的なステップとして、現在私たちが目にし、使用しているドライバー アシスト機能として、AEB、車線維持支援、ブラインド スポット アラートなどがあります。
詳細: 私の車はどの程度自律的ですか? 自動運転のレベルの説明

最初のアプローチは、システムが決定を下すデータのソースとして、カメラのみに依存します。 後者のアプローチはセンサーフュージョンとして知られており、カメラからのデータだけでなく、ライダー、レーダー、超音波センサーなどの他のセンサーからのデータを結合することを目的としています。
カメラのみ
テスラとスバルは、ADAS やその他の自動運転機能をカメラに依存している 2 つの人気自動車メーカーです。
哲学的にカメラのみを使用する理論的根拠は、Tesla の CEO であるイーロン マスクを言い換えることで要約できます。イーロン マスクは、人間が目以外のものを必要とせずに運転できるのであれば、カメラ以外は必要ないと述べています。
マスク氏はさらに詳しく説明し、複数のカメラを持つことは「頭の後ろにある目」のように機能し、平均的な人よりもはるかに高いレベルの安全性で車を運転できる可能性があると述べています.

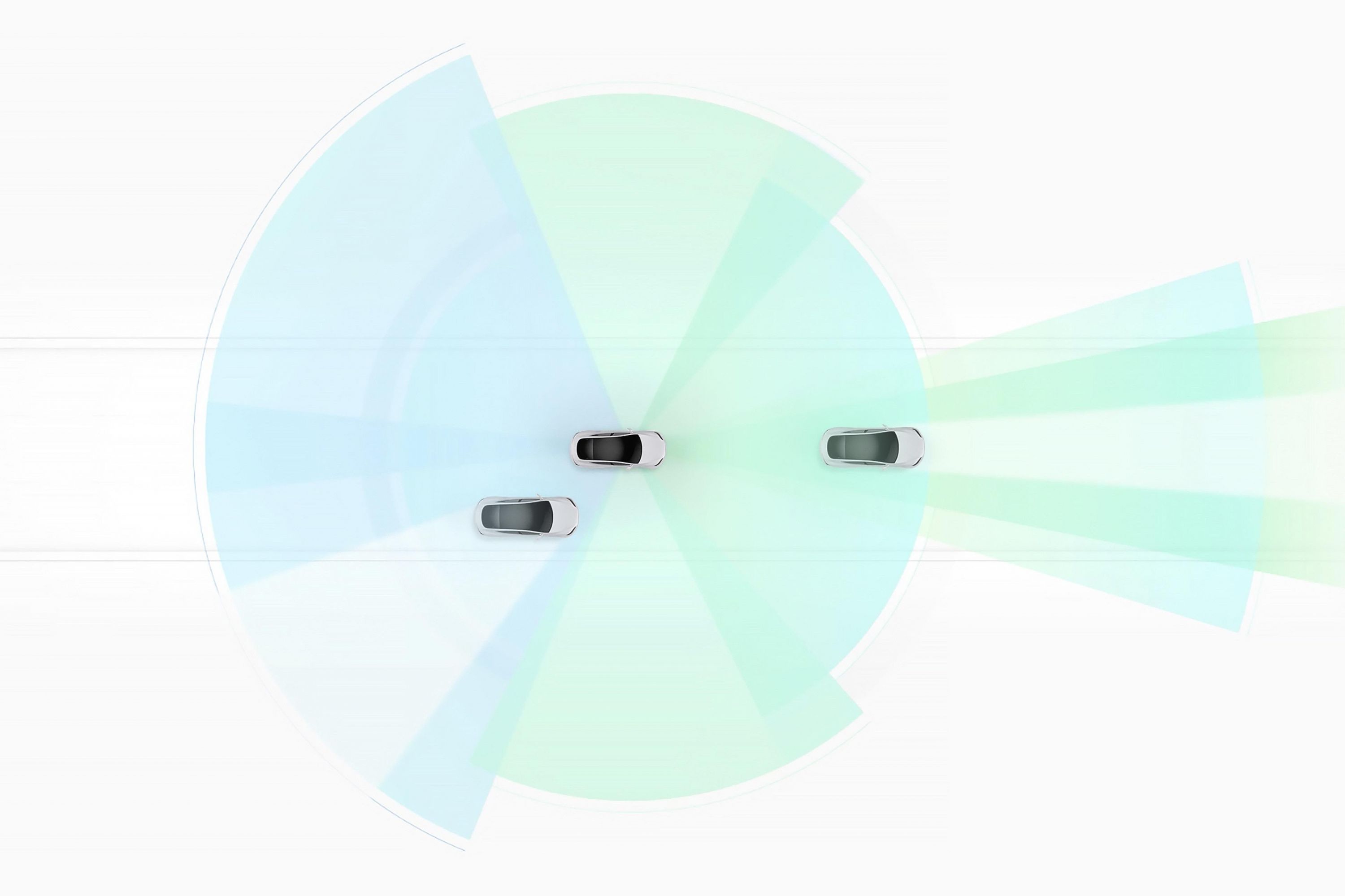
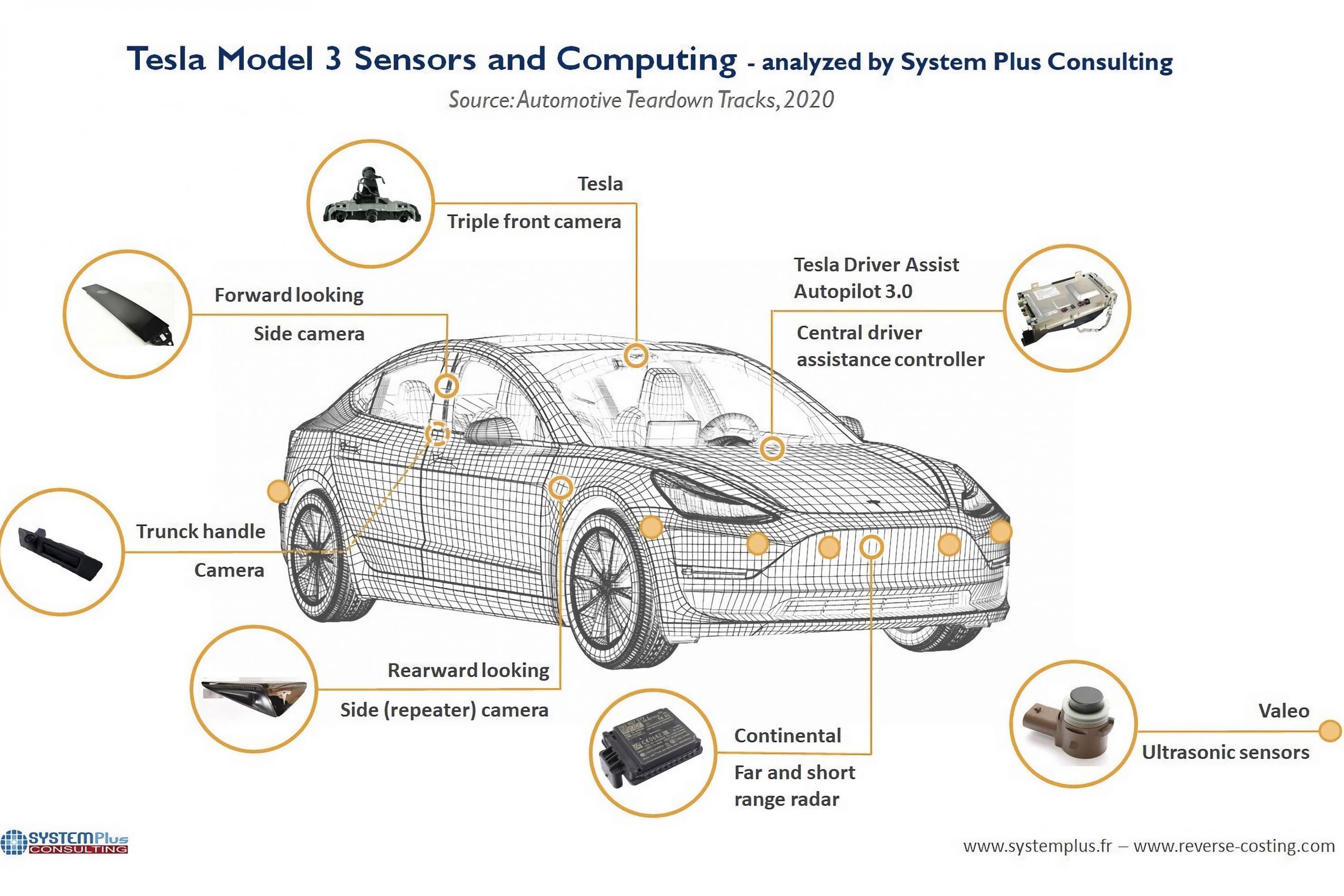
現在販売されているテスラ モデル 3 およびモデル Y の車両は、それに対応して、8 つの外側に面したカメラで構成される洗練されたセットアップを提供します。
これらはフロントガラスに取り付けられた 3 つの前向きカメラで構成され、それぞれ焦点距離が異なり、B ピラーに取り付けられた 1 組の前向きサイド カメラ、サイド リピーター ライト ハウジング内に取り付けられた 1 組の後ろ向きサイド カメラ、および必須のリバース カメラで構成されています。 -ビューカメラ。
一方、スバルは、MY23 スバル アウトバック (現在米国向けに公開されていますが、間もなく登場します) に見られるように、ドライバー支援システムの EyeSight スイートのほとんどのバージョンにフロントガラスに取り付けられたカメラのペアを使用し、最新の EyeSight X 世代を使用しています。より良い視野のための 3 番目の広角グレースケール カメラ。
これらのカメラのみのセットアップの支持者は、それぞれが異なる視野と焦点距離を持つ複数のカメラを使用すると、適切な奥行き認識が可能になり、アダプティブ クルーズ コントロール、車線維持支援、その他の ADAS 機能などのテクノロジを促進できると主張しています。

これにより、貴重なコンピューティング リソースを他のデータ入力の解釈に割り当てる必要がなくなります。また、車載コンピューターが、ある種類のセンサーからのデータを別の種類のセンサーよりも優先するように強制する競合する情報を取得するリスクも排除されます。
レーダーやその他のセンサーはフロント バンパーの後ろまたは内部に取り付けられることが多いため、カメラのみのセットアップを採用すると、これらのセンサーを交換する必要がないため、衝突時の修理費を削減できるという実用的な利点もあります。
カメラだけに依存することの明らかな欠点は、大雨、霧、雪などの悪天候や、日中の明るい太陽光がカメラのレンズに直接当たる時間帯では、カメラの効果が著しく低下することです。 さらに、フロントガラスが汚れていると視界が遮られ、パフォーマンスが低下するリスクもあります。
ただし、 最近のプレゼンテーション、テスラのオートパイロットの元責任者であるアンドレイ・カルパシーは、テスラ ビジョンの開発により、一時的な悪天候によって引き起こされる問題を効果的に軽減できると主張しました。
物体の自動ラベリングなどの高度なニューラル ネットワークと技術を使用することで、Tesla Vision は車の前にある物体を認識し続け、破片やその他の危険な天候の存在にもかかわらず、少なくとも短距離の経路を予測することができます。一時的にカメラの視界を遮る場合があります。
ただし、天候が常に悪かった場合、カメラから受信したデータの品質や信頼性は、悪天候の影響を受けにくいレーダーなどのセンサーからのデータを組み込んだフュージョン セットアップの場合ほど良くない可能性があります。
さらに、1 種類のセンサーのみを提供すると、センサーの種類が異なるため、使用できる冗長性が低下するというリスクもあります。
センサーフュージョン
対照的に、自動車メーカーの大部分は、ADAS と関連する自動運転システムを開発するために、複数のセンサーを利用することを選択しています。
センサー フュージョンとして知られるこれには、これらの各センサーから同時にデータ フィードを取得し、それらを組み合わせて、自動車の現在の運転環境の信頼性の高い全体像を生成することが含まれます。
前述のように、多数のカメラに加えて、展開されるセンサーには、通常、レーダー、超音波センサー、場合によってはライダー センサーが含まれます。
レーダー (電波探知および測距) は、電波パルスを放射し、それらが反射するのにかかる時間を測定することによって物体を検出します。
その結果、一般に、LIDAR やカメラで提供できる詳細レベルと同じレベルは提供されず、解像度が低いため、オブジェクトの正確な形状を正確に判断したり、近接して配置された複数の小さなオブジェクトを区別したりできません。
ただし、雨、霧、ほこりなどの気象条件の影響を受けず、一般的に車の前方に物体があるかどうかの信頼できる指標です。

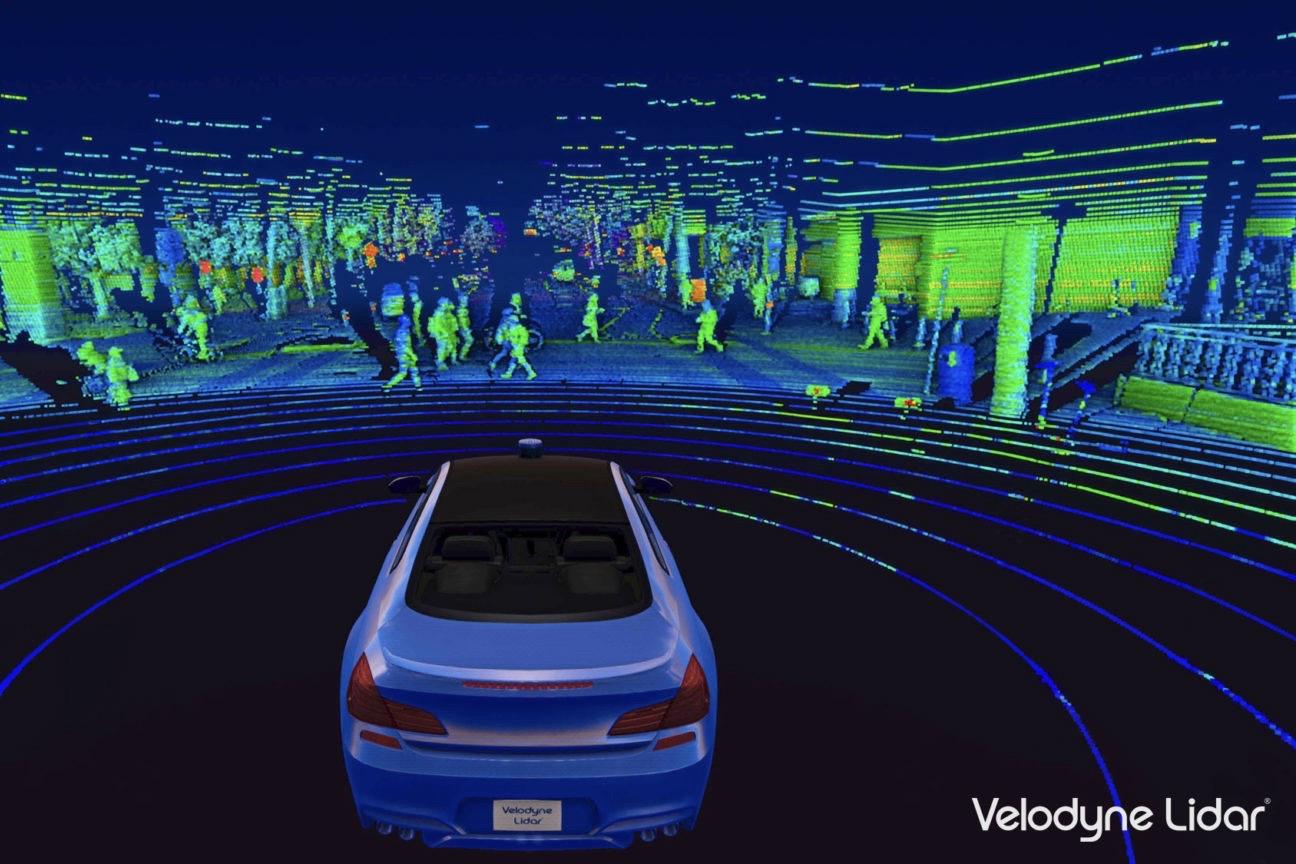
ライダー (光検出と測距) センサーは、レーダーと同様の基本原理で動作しますが、ライダー センサーは電波の代わりにレーザーを使用します。 これらのレーザーは光パルスを放出し、周囲の物体によって反射されます。
カメラ以上に、ライダーは車の周囲の非常に正確な 3D マップを作成でき、歩行者と動物を区別でき、これらの物体の動きと方向を簡単に追跡することもできます。
ただし、カメラと同様に、ライダーは気象条件の影響を受け続けており、設置には依然として費用がかかります。
超音波センサーは、伝統的に自動車スペースで駐車センサーとして使用されており、自然界のコウモリでも使用されているエコーロケーションとして知られる技術を通じて、ドライバーに他の車との距離を示す可聴信号を提供します。
これらのセンサーは、ADAS や自動運転車の分野で低速で近距離を測定するのに効果的であり、たとえば、自動車が立体駐車場の空いている場所を自律的に見つけて駐車できるようにすることができます。
-
写真: オリジナルデザイン、レーダー付き
センサー フュージョン アプローチを採用する主な利点は、さまざまな種類のセンサーがさまざまな状況でより効果的に機能できるため、より広い範囲の条件でより正確で信頼性の高いデータを取得できることです。
このアプローチは、特定のセンサーが機能しない場合の冗長性を高める可能性も提供します。
もちろん、複数のセンサーは複数のハードウェアを意味し、最終的にはセンサー フュージョンのセットアップのコストも、同等のカメラのみのシステムよりも高くなります。
たとえば、ライダー センサーは通常、メルセデス ベンツ EQS で提供されるドライブ パイロット システムなどの高級車でのみ利用できます。
詳細: 私の車はどの程度自律的ですか? 自動運転のレベルの説明