現代自動車グループ (グループ) は、航空宇宙パートナーと連携して、月面探査モビリティ ローバーの初期開発モデルの構築を開始したと発表しました。
2022 年 7 月、当グループは、月面探査のためのモビリティ ソリューションを開発するための諮問機関を運営および支援するために、航空宇宙部門の韓国の 6 つの研究機関と共同多国間研究契約を締結しました。 早ければ2024年後半に初期試験機を完成させ、2027年に打ち上げ能力のあるモデルを作ることを目指しています。
ローバーについては、現代自動車と起亜自動車の高度なロボティクスと自動運転技術 (カメラ、LiDAR)、駆動システム (モーター、ホイール、サスペンション)、充電部品 (ソーラーパネル、バッテリー)、および現代ロテムのロボットを利用しています。多目的モビリティプラットフォームの一部としての製造技術。
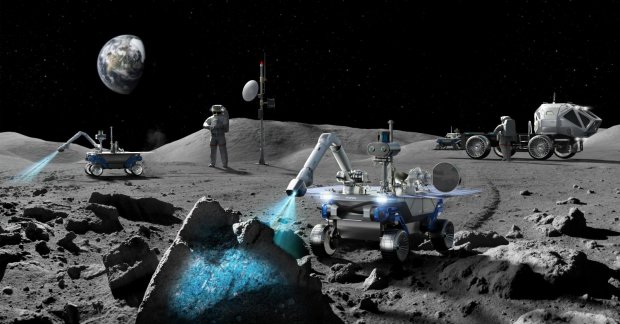
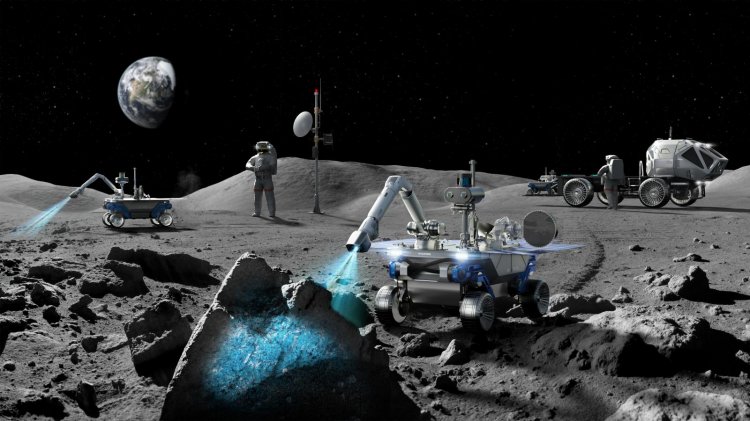
グループのコンポーネントはローバーの下部を占め、上部は月面探査用の科学ペイロードで構成されます。 ローバーは、月面の極限環境に耐えるために、熱管理機能と放射線遮蔽機能を備えています。
ローバーの下部が開発されると、諮問機関はそれがモビリティ プラットフォームとして機能し、リソースを求めて月面を掘削、掘削、有人探査するためのさまざまな高度な技術を保持する上部をサポートすることを期待しています。 最終的な目標は、さまざまなペイロードを処理するために、普遍的に適用可能なモビリティ プラットフォームを提供することです。
開発、テスト、改良に続いて、月の南極付近にローバーを着陸させ、さまざまな科学的ミッションを実行する計画です。 太陽光発電の自動運転モビリティ ユニットの重量は約 70 kg です。