
マニピュレーションとセンシングは、ロボティクスの可能性を解き放つための 2 つの重要な柱と長い間考えられてきました。 もちろん、両者の間にはかなりの重複があります。 グリッパーは産業用ロボット工学の基本要素になっているため、これらのシステムには周囲の世界と相互作用するための適切なメカニズムが必要です。
ビジョンは長い間、これらすべての鍵でしたが、企業はますますデータ収集の方法として戦術に注目しています。 とりわけ、農産物であろうと人間であろうと、特定の物体にどれだけの圧力をかけるかをロボットがより正確に認識できるようになります。
数か月前、スコットランドのエディンバラを拠点とするスタートアップ Touchlab は、TC セッションのピッチオフで勝利しました: ロボティクス イベント、いくつかの厳しい競争の中で。 審査員は、ロボット皮膚の作成に対する同社のアプローチが、センシングの可能性を最大限に引き出すのに役立つ重要なものであることに同意しました。 XPrize もこれまでのところ同意しています。 同社は現在、1,000 万ドルの XPrize アバター コンペティションのファイナリストです。
同社は現在、XPrize ファイナルのグリッパーを提供しているドイツのロボット企業 Schunk と協力しています。
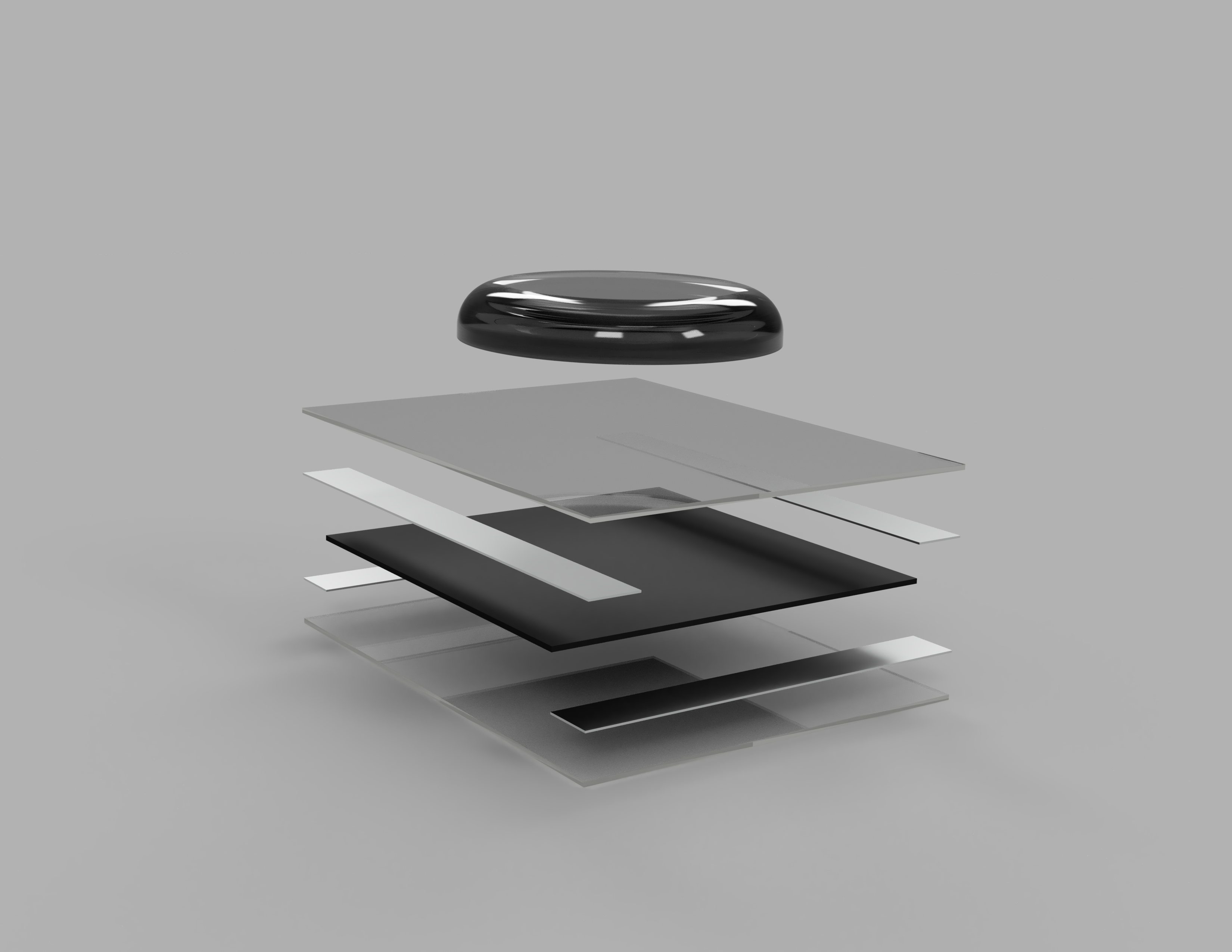
画像クレジット: タッチラボ
「私たちの使命は、機械に人間のタッチの力を与えるために、ロボット用のこの電子スキンを作成することです」と、共同創設者兼 CEO の Zaki Hussein 氏は、同社の新しいオフィス スペースから TechCrunch に語った。 「人間のタッチを再現するには多くの要素があります。 このセンシング技術を製造しています。 人間の皮膚よりも薄く、ロボットのどこに置いても位置と圧力を与えることができます。 また、接触点で 3D の力が得られるため、ロボットは器用でやりがいのある活動を行うことができます。」
まず、同社は遠隔操作アプリケーション (つまり XPrize Avatar 全体) を検討しています。具体的には、このシステムを使用して、人員が不足している病院でロボットを遠隔操作します。 一方では、センサーを装備した TIAGo++ ロボットが人間の労働者に余分な手を貸します。 もう 1 つは、すべてのタッチ データを変換するハプティック VR ボディスーツを装着したオペレーターです。 そのような技術には現在限界がありますが。
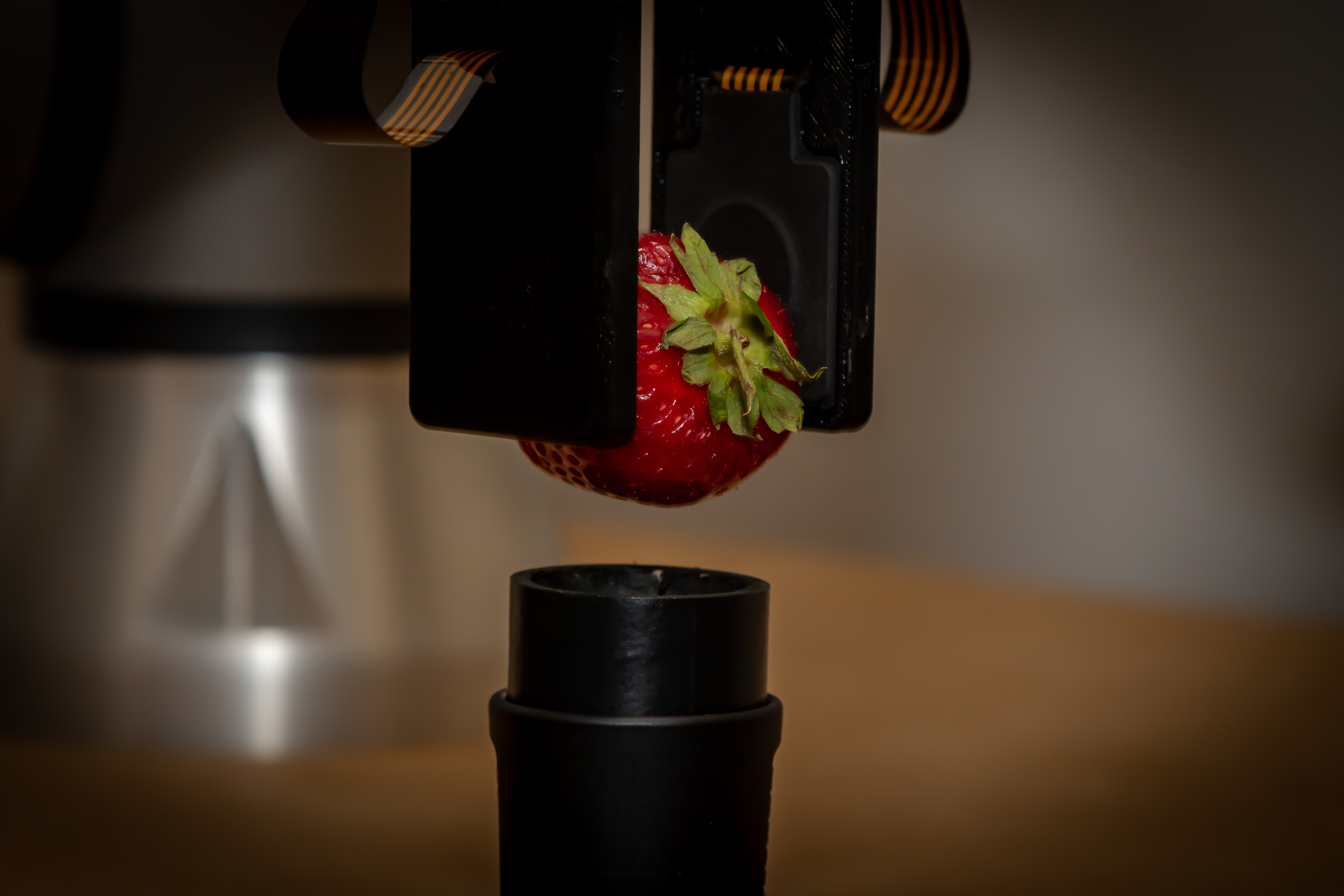
画像クレジット: タッチラボ
「皮膚の圧力をスーツに変換するソフトウェアの層があります。 また、ハプティック グローブも使用しています」と Hussein 氏は言います。 「現在、私たちの肌は、触覚インターフェースを介してユーザーに送信できるデータよりもはるかに多くのデータを収集しています。 そのため、少しボトルネックがあります。 現在最高のハプティック インターフェースの可能性を最大限に活用できますが、ロボットがユーザーの能力を超えて感じるポイントがあります。」
ロボットによって収集された追加情報は、VR ヘッドセットを介した視覚データなど、さまざまなチャネルを通じて変換されます。 同社は、このシステムを使用した実世界での試験運用を開始しようとしています。 「それは2月になるでしょう」とフセインは言います。 「私たちは、高齢者急性期病棟の高齢者患者を対象に、3 か月間の病院での治験を行っています。 このロボットがその設定で展開されるのは世界初です。」