
ホンダは、ホンダの協調知能 (CI) と人工知能を利用して人と機械の共存をサポートする超小型電気自動車のテストを開始すると、メーカーは声明で述べています。
メーカーは、茨城県常総市の 2 か所で、CI マイクロモビリティ技術の実証試験を開始します。 今月から水海道あすなろの里キャンプ場、北半球では2023年春からアグリサイエンスバレーがスタートします。
2台のマイクロモビリティマシンがこれらのテストを担当しており、デュオは、1人または数人用の乗用マイクロモビリティビークル「CiKoMa」と、ユーザーを記憶および認識してユーザーに従うマイクロモビリティロボット「WaPOCHI」で構成されています。際立った特徴。
ホンダは、2011 年にマイクロ コミューター EV を発表し、翌年にはマイクロ コミューター プロトタイプ EV を発表して、マイクロ EV の道を歩んできました。

ホンダは、CI マイクロモビリティ技術の進化に合わせて技術実証実験の領域を拡大し、2030 年頃の実用化を目指して研究開発を継続するとしている。
少子高齢化に加え、新型コロナウイルス感染拡大後の生活習慣の変化により、人やモノの自由な移動のニーズが高まると予測し、Hondaは2つのコア技術を確立しました。 地図を使わない協調運転技術、ユーザーの意思理解とコミュニケーション技術。
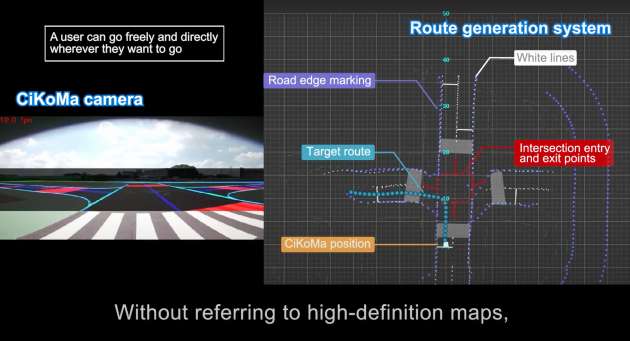
1 つ目のマップレス協調運転技術は、マイクロモビリティ マシンが高精度の地図に頼ることなく、周囲を認識しながら自動運転できるようにすることを目的としています。 一方、2つ目の技術は、機械が「対話とジェスチャーによる人間のようなコミュニケーション」を行うことを目的としています。
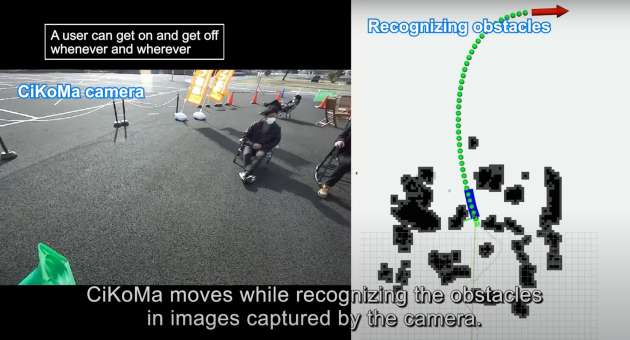
機械が高精度の地図に頼ることなく自動運転する能力は、交差点やカーブなどの道路構造や、歩行者や他の車両を含む他の道路利用者をリアルタイムで理解することによって得られます。搭載されたカメラは、マシンがすばやく理解し、明確な通路を即座に判断する必要があります。
この機能は、道路標示や縁石などの物理的な境界がないオープン スペースで通行可能なエリアのマップを生成できるようにも拡張されます。 これは、障害物や物体までの距離の 3 次元画像を即座に生成することによるものであり、人間が自分の目で見るように通過可能な領域を認識します、と本田氏は述べています。
これらに加えて、人環境協調行動計画機能により、さまざまな運転状況を考慮したリアルタイムのルート最適化アルゴリズムを使用して、まるで熟練した人間のドライバーが現場にいるかのように目的地までスムーズに移動できます。車両の制御。

2つ目の技術は、ユーザーの意思理解とコミュニケーションであり、マイクロモビリティマシンが人間のように言葉やジェスチャーを理解し、自ら考え、提案できるようにすることを目的としています。
これには、ユーザーとマシンが通信して相互理解を達成する意図交換機能が含まれます。 複数のユーザーの特徴を判別し、対話を行うことでユーザーを識別する対話ベースのユーザー識別機能。 ユーザーとマシンのネゴシエーション/提案機能は、人間の経験を事前知識として登録し、ユーザーが潜在的に危険な場所に車両を駐車するように要求した場合などのマイナス要因を回避します。
2022年11月、水海道あすなろの里キャンプ場・宿泊施設でHondaの地図を使わない協調運転技術の進化に向けた技術実証実験を開始する。 これは、CiKoMa マイクロモビリティ車両の 4 人乗りモデルで行われます。 テストは、人間のドライバーが車両を監督することから始まり、地図を使わない協調運転技術が進歩するにつれて自動運転に移行します。
その後、アグリ サイエンス バレーでのテストは 4 人乗りの CiKoMa で継続され、上半身に複数のカメラが取り付けられ、周囲の 360 度のビューをキャプチャし、AI を使用して追跡するマイクロモビリティ ロボット WaPOCHI が追加されます。ユーザーの特徴。
WaPOCHIは、交通や障害物でユーザーを見失った場合、記憶されたユーザーの特徴を思い出してユーザーを見つけます。 この研究の目的は、WaPOCHI がユーザーの歩きやすさをリードすることであると本多氏は述べています。
アグリサイエンスバレーでの WaPOCHI の実証実験は、アグリサイエンスバレー内の店舗の販売スタッフに続いてマイクロモビリティロボットから始まり、一般ユーザーのショッピングなどでの実証実験に向けて開発が進められます。