マップは、世界とその中のすべてに関する詳細な知識を備えており、AIが高度で安全な運転の意思決定を行うために使用する先見性を提供します。
GTCの基調講演で、NVIDIAの創設者兼CEOのジェンスンフアンは、安全性を向上させながら最高レベルの自律性を実現するように設計されたマルチモーダルマッピングプラットフォームであるNVIDIADRIVEMapを紹介しました。 これは、DeepMapサーベイマッピングの精度と、AIベースのクラウドソーシングマッピングの鮮度とスケールを組み合わせたものです。
カメラ、LIDAR、レーダー、GNSSの4つのローカリゼーションレイヤーを備えたDRIVE Mapは、最先端のAIドライバーに必要な冗長性と汎用性を提供します。
DRIVE Mapは、2024年までに北米、ヨーロッパ、アジアの500,000 kmの道路に調査レベルのグラウンドトゥルースマッピングを提供します。このマップは継続的に更新され、数百万台の乗用車で拡張されます。
NVIDIA DRIVE Mapは、自動運転車業界全体で利用できます。
多層
DRIVE Mapには、カメラ、レーダー、LIDAR、およびGNSSモダリティで使用するためのデータの複数のローカリゼーションレイヤーが含まれています。 AIドライバーは、マップの各レイヤーに個別にローカライズでき、最高レベルの自律性に必要な多様性と冗長性を提供します。
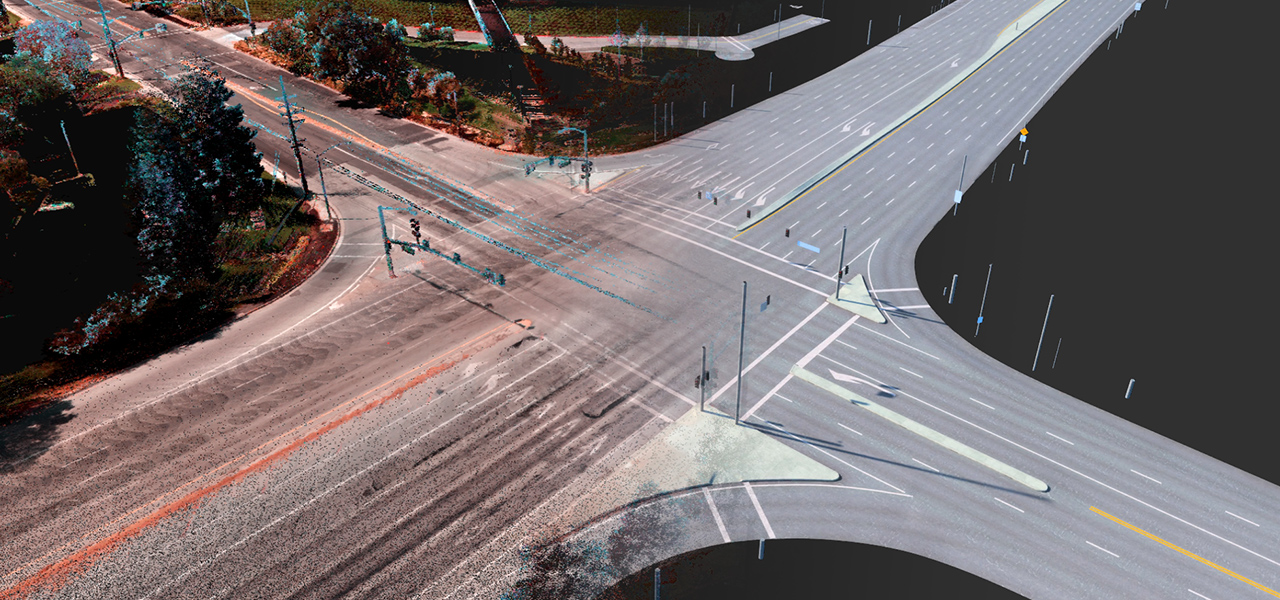
カメラローカリゼーションレイヤーは、車線分割、道路標示、道路境界、信号機、標識、ポールなどのマップ属性で構成されます。

レーダーローカリゼーションレイヤーは、レーダーリターンの集合点群です。 これは、カメラにとって困難な照明条件の悪さや、カメラやLIDARにとって困難な気象条件の悪さで特に役立ちます。

レーダーローカリゼーションは、一般的なマップ属性が利用できない郊外エリアでも役立ちます。これにより、AIドライバーは、レーダーリターンを生成する周囲のオブジェクトに基づいてローカライズできます。
LIDARボクセル層は、環境の最も正確で信頼性の高い表現を提供します。 5センチメートルの精度で世界の3D表現を構築します。これは、カメラやレーダーでは実現が非常に難しい精度です。

GNSS(グローバルナビゲーション衛星システム)レイヤーは、車両の位置、速度、向きに関する情報を高い絶対精度で提供し、データ収集車両の差動GNSSから収集します。 この機能は、悪天候(雨、霧、雪など)やマーキングが制限された道路で特に役立ちます。
マップにローカライズされると、AIはマップによって提供される詳細なセマンティック情報を使用して、事前に計画を立て、安全に運転の決定を実行できます。
両方の長所
DRIVE Mapは、2つのマップエンジン(グラウンドトゥルースサーベイマップエンジンとクラウドソーシングマップエンジン)で構築されており、地球規模の艦隊の集合的な記憶を収集して維持します。
この独自のアプローチは、両方の長所を組み合わせて、専用の調査車両でセンチメートルレベルの精度を実現するとともに、数百万台の乗用車がマップを継続的に更新および拡張することによってのみ達成できる鮮度とスケールを実現します。
グラウンドトゥルースエンジンは、DeepMapサーベイマップエンジンに基づいています。これは、過去6年間に開発および検証された実証済みのテクノロジーです。
AIベースのクラウドソースエンジンは、数百万台の車から地図の更新を収集し、車の運転中に常に新しいデータをクラウドにアップロードします。 次に、データが集約され、マップを更新するために使用され、実際のフリートの最新の無線マップ更新が提供されます。
DRIVE Mapは、データインターフェイスDRIVE MapStreamも提供します。これにより、DRIVE Mapの要件を満たす乗用車は、カメラ、レーダー、およびLIDARデータを使用してマップを継続的に更新できます。
地球規模のデジタルツイン
DRIVE Mapは、AIが最適な運転決定を行うのを支援するだけでなく、ディープニューラルネットワークトレーニングやテストと検証のためのグラウンドトゥルーストレーニングデータの生成から、AV展開を加速します。
これらのワークフローは、実際の地図データが読み込まれて保存されるOmniverseを中心としています。 Omniverseは、サーベイマップ車両と数百万台の乗用車によって継続的に更新および拡張されるデジタルツインの地球規模の表現を維持しています。
Omniverse上に構築された自動コンテンツ生成ツールを使用して、詳細な地図は、で使用できる運転可能なシミュレーション環境に変換されます NVIDIA DRIVE Sim。 道路の標高、道路標示、島、信号機、標識、垂直支柱などの機能は、センチメートルレベルの精度で正確に複製されます。
物理ベースのセンサーシミュレーションとドメインランダム化により、AV開発者はシミュレートされた環境を使用して、実際のデータでは利用できないトレーニングシナリオを生成できます。
AV開発者は、シナリオ生成ツールを適用して、AVを実世界に展開する前にデジタルツイン環境でAVソフトウェアをテストすることもできます。 最後に、デジタルツインは、フリートオペレーターに、車両が世界のどこで運転しているかの完全な仮想ビューを提供し、必要に応じてリモート操作を支援します。
非常に用途が広くスケーラブルなプラットフォームであるDRIVEMapは、AIドライバーに、自律機能を継続的に進歩させるために必要な世界の理解を提供します。