動物にインスパイアされたロボットが大流行しており、最近の作品では鳥、ヘビ、タコ、さらには昆虫から能力を引き出しています。バギーの生き物の王国は、非常に小さな規模で大きな利益をもたらす可能性のある最新のインスピレーションを提供しました.
複数の大学にまたがる機械工学研究者のグループが、過去 10 年間にわたって調査を行ってきました。 カブトムシをクリック‘進化、解剖学、および動き。 近年では、 チームは集中した 小さな昆虫の胸部内の筋肉が、体長の何倍も移動するだけでなく、仰向けになった場合にそれ自体を直立させる方法について. スナップバックリングとして知られる推進力は、ロボット工学の分野に適応できる自然の特徴と見なされています。
[Related: Watch this bird-like robot make a graceful landing on its perch.]
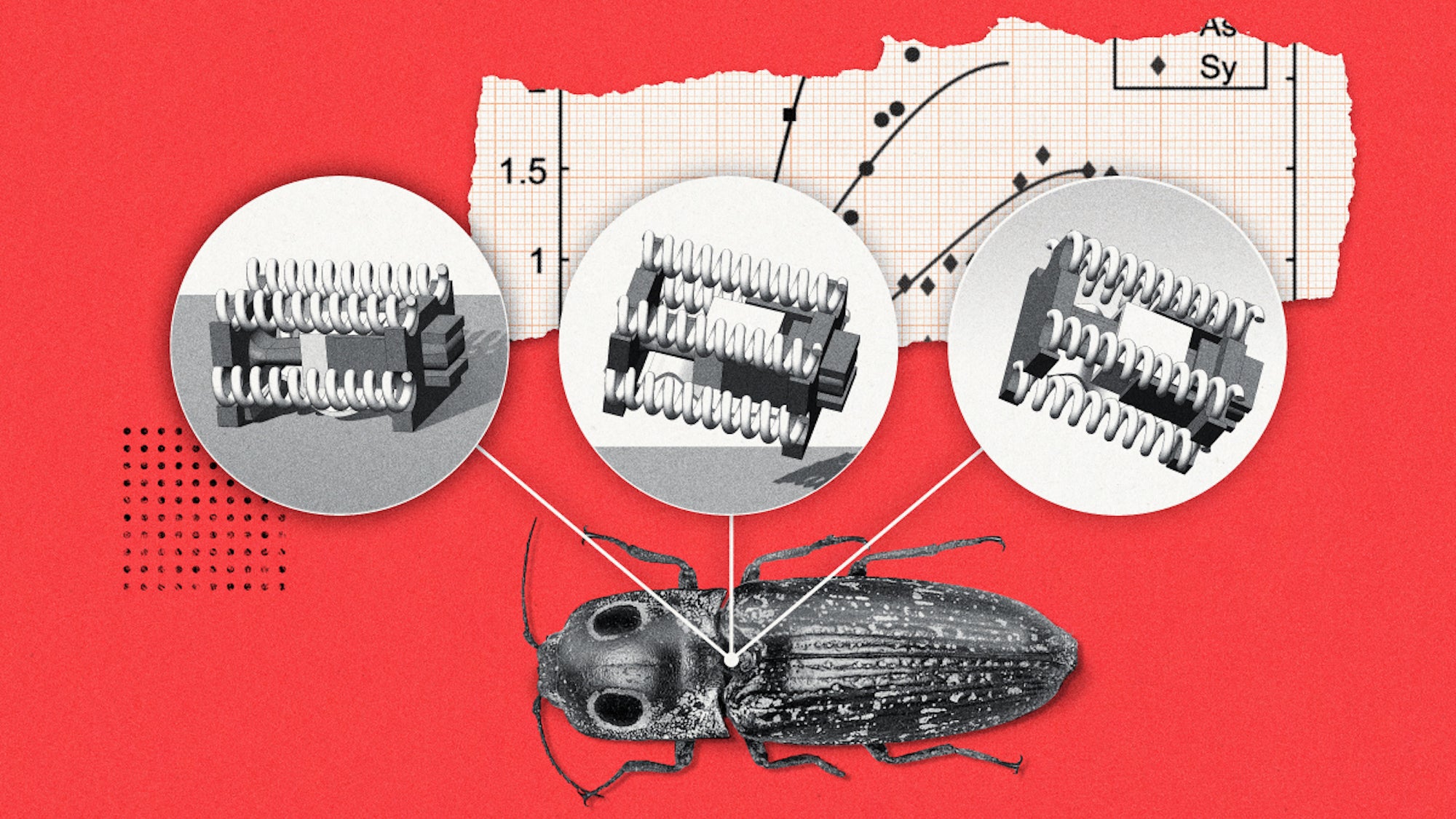
で公開された新しい論文に詳述されているように 米国科学アカデミーの議事録、率いるチーム サミー・タウフィック は、カブトムシの解剖学的構造を模倣する一連のコイル状アクチュエータを設計しました。 引っ張ると、ビーム状のデバイスが座屈し、昆虫の胸部筋肉のような弾性エネルギーを蓄えます。 アクチュエーターが解放されると、結果として増幅されたブーストが小さなロボットを上向きに推進し、実際のバグとほぼ同じ速度で障害物を乗り越えることができます. 動的座屈カスケードとして知られるこの動きは、小型のオンボード カメラを使用して、ジェット タービンのような大きなシステムの内部を横断して調べるために、将来のロボットで使用される可能性があります。
タウフィック 声明で説明した チームは、生物学的データと数学的モデリングに基づいて、最も経済的で効果的なものを決定するために、4 つのロボット アクチュエータのバリエーションを実験しました。 最終的に、2 つの設計により、手作業による介入を必要とせずにロボットをうまく推進させることができました。
[Related: This robot gets its super smelling power from locust antennae.]
「今後、これらのロボットの次世代の正確な設計に関する決まったアプローチはありませんが、この研究はこの技術の進化に種を蒔きます」と Tawfick 氏は説明し、試行錯誤のプロセス全体が生物の進化に似ています。
科学者はまた、動的座屈カスケードアクチュエータを使用した将来の昆虫サイズのロボットが、大規模農場などの農業環境に配備される可能性があると考えています。 多くの場合、ドローンやローバーなどのテクノロジーがフィールドを監視しますが、これらの非常に小さなデバイスは、観察と記録のまったく新しい、より繊細な方法を開く可能性があります。