ロボットについて考えるとき、私たちは通常、ぎこちない歯車、機械部品、ぎくしゃくした動きを思い浮かべます。 しかし、新世代のロボットは、その型を破ろうとしています。
チェコの劇作家カレル・チャペックが 1920 年に初めて「ロボット」という用語を作って以来、これらの機械はさまざまな形やサイズに進化してきました。 ロボットは現在、磁場、空気、または光などのさまざまな型にはまらないモーターによって制御される関節を使用して、硬く、柔らかく、大きく、微視的で、肉体を持たず、または人間のようにすることができます。
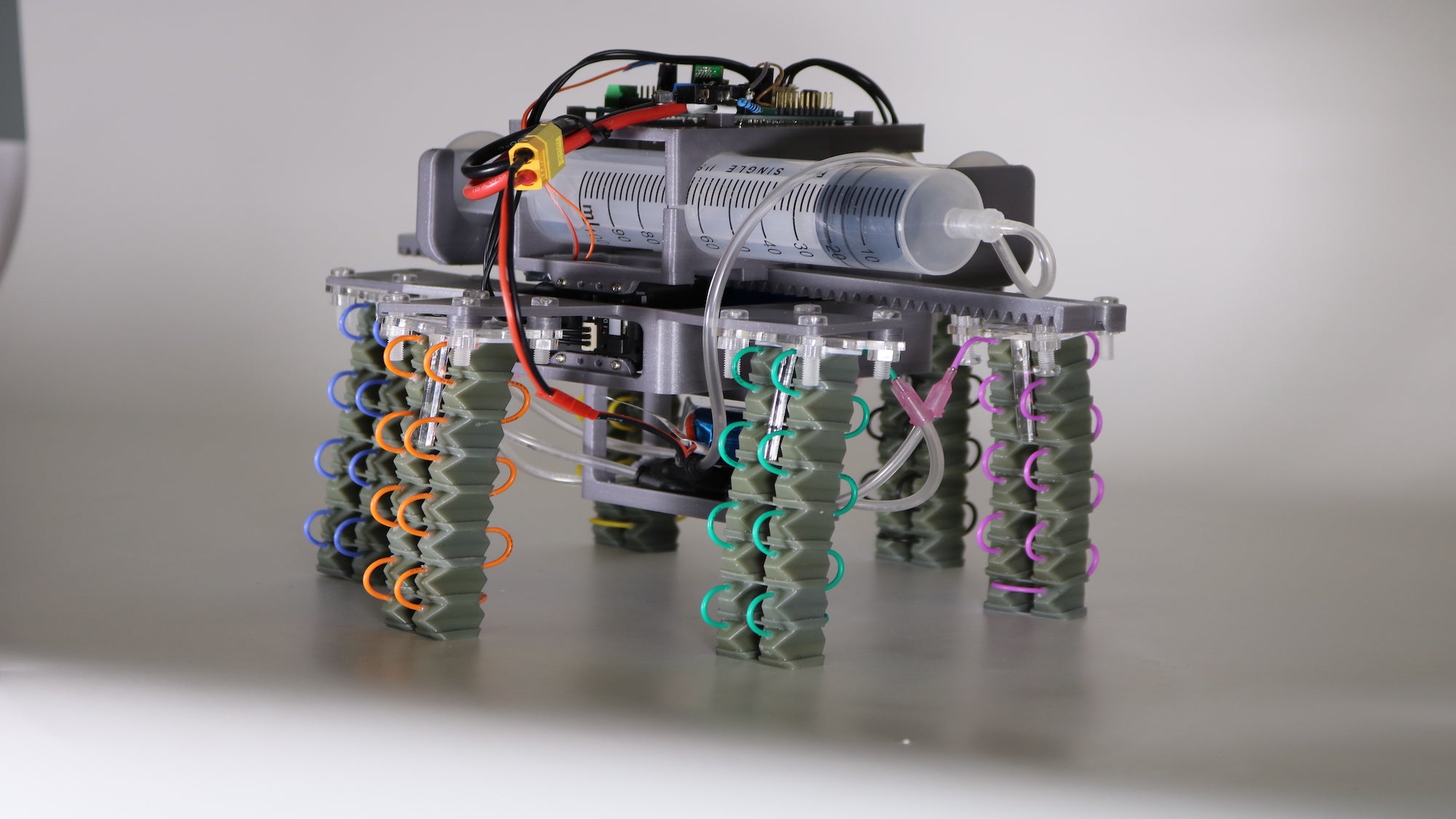
コーネル大学のエンジニア チームが開発した新しい 6 本脚のソフト ロボットは、流体動力モーターを使用して複雑な動きを実現し、独自の動きを生み出しました。 その結果、バッテリ駆動の Arbotix-M コントローラと 2 つのシリンジ ポンプを上部に備えたバックパックを運ぶ、自立型のバグのような仕掛けができました。 注射器は、ロボットの手足が 1 秒あたり体長 0.05 の速度で表面に沿って歩きながら、液体をポンプで出し入れします。 ロボットの設計は、ジャーナルに掲載された論文で詳細に説明されました 高度なインテリジェント システム 先週。
ロボットはコーネル大学から生まれました 集団体現知能研究室これは、ロボットがタコのような中央の「脳」の外側にある体の他の部分を使って、環境について考え、情報を収集する方法を探っています。 これを行う際、ロボットは次に何をすべきかを計算するために、重い計算ではなく、そのバージョンの反射神経に依存します。
[Related: This magnetic robot arm was inspired by octopus tentacles]
ロボットを構築するために、チームは 6 本のくり抜かれたシリコン製の脚を作成しました。 脚の内側には、流体で満たされたベローズ (アコーディオンの内側を描いてください) と、相互に接続されたチューブが閉じたシステムに配置されています。 チューブは、システム内を流れる流体の粘度を変化させ、脚の形状をゆがめます。 ベローズ構造の形状により、注射器からの液体が特定の方法で出入りすることができ、各脚内の位置と圧力を調整して、脚をしっかりと伸ばしたり収縮させたりします。 圧力と位置のさまざまな交互の組み合わせを調整することで、脚とロボットを動かす循環プログラムが作成されます。
によると プレスリリースCornell のポスドク研究員であり、この研究の著者である Yoav Matia は、「アクチュエータの可能な動作を予測し、さまざまな入力圧力、形状、およびチューブとベローズの構成がどのようにそれらを達成するかを予測できる完全な記述モデルを開発しました。流体入力。
これらのゴム製ジョイントの柔軟性により、ロボットは横断する地形や障害物の性質に応じて、歩行や歩行スタイルを切り替えることもできます。 研究者たちは、これらの流体ベースのモーターと軽快な手足の背後にある技術は、3D プリント機械やロボット アームなど、他のさまざまなアプリケーションに適用できると述べています。