ロボット工学の課題の中には、すぐに明確なアプリケーションがあるものがあります。 システムがより広範な課題を解決するのを支援することに重点を置いているものもあります。 教えること サッカーをする小型ロボット 互いに反対することは、後者のカテゴリーにしっかりと当てはまります。
の著者 新しい紙 強化学習を使用して MIT の Mini Cheetah ロボットにゴールキーパーのプレーを教える方法の詳細:
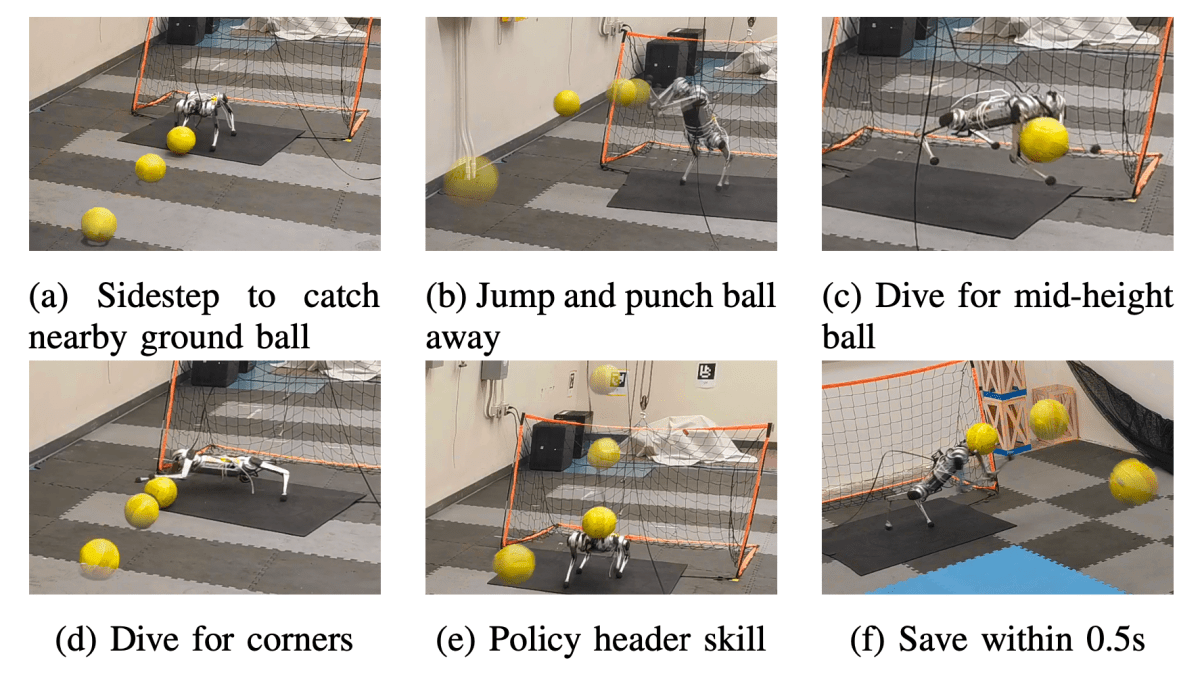
四足動物を使用したサッカーのゴールキーピングは、非常に動的な移動と正確で高速な非把持オブジェクト (ボール) 操作を組み合わせた挑戦的な問題です。 ロボットは、非常に短い時間 (通常は 1 秒未満) で動的移動操作を使用して、飛んでいる可能性のあるボールに反応し、迎撃する必要があります。 この論文では、階層型モデルフリーRLフレームワークを使用してこの問題に対処することを提案します。
画像クレジット: ハイブリッドロボティクス
事実上、ロボットは発射体にロックし、1 秒以内にボールをブロックするために自分自身を操作する必要があります。 ロボットのパラメーターはエミュレーターで定義され、Mini Cheetah は 3 つの動き (サイドステップ、ダイブ、ジャンプ) に依存して、移動中の軌道を決定することで、ゴールに向かう途中のボールをブロックします。
プログラムの有効性をテストするために、チームはシステムを人間のコンポーネントと仲間のミニ チーターの両方と対戦させました。 特に、ゴールを守るために使用されるのと同じ基本的なフレームワークがオフェンスに適用できます。 この論文の著者は、「この作業では、ゴールキーパーのタスクのみに焦点を当てましたが、提案されたフレームワークは、マルチスキルのサッカー ボール キックなど、他のシナリオに拡張できます」と述べています。