生物学に着想を得たソフト ロボットは、さまざまなシナリオで大いに役立ちますが、他のクラスのテクノロジーと同様に、限界があります。 とりわけ、これらの柔軟な構造は、より剛性の高い構造と同じ速度で移動するのに苦労する可能性があります. ノースカロライナ州立大学の研究者チームは、水泳の速度を上げるために 自然からの別のインスピレーションに変わった:マンタ。
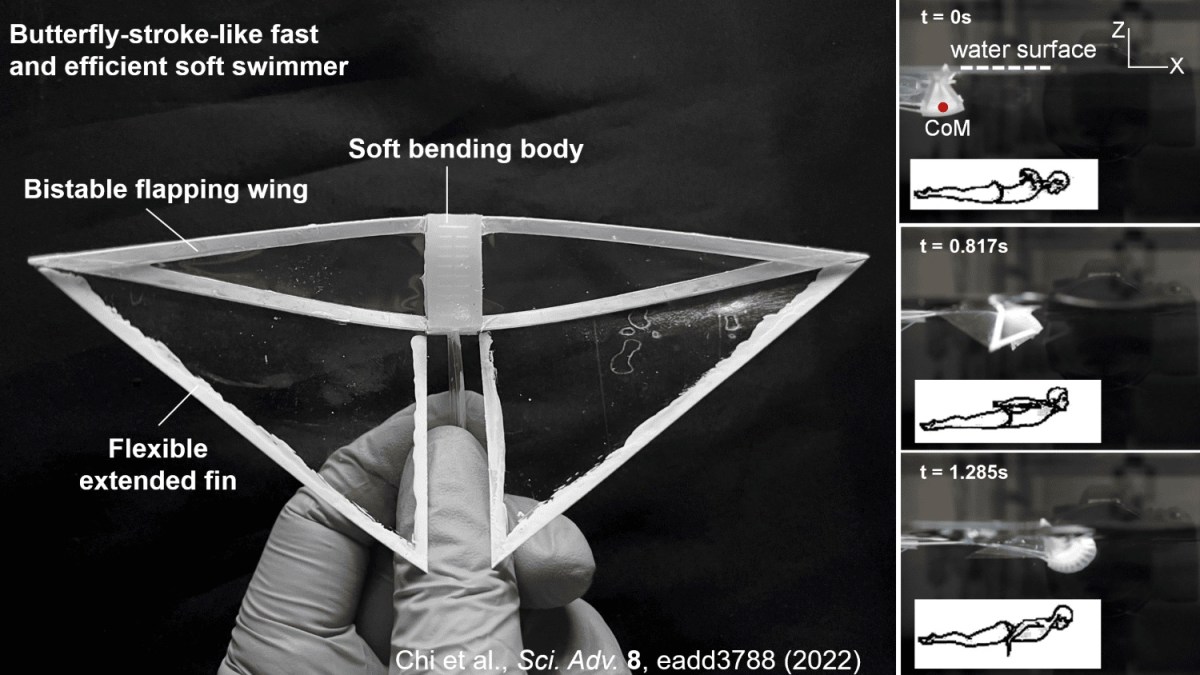
魚の方を見るのは理にかなっています。 これらのサメのいとこは、巨大な翼のような胸びれのおかげで効果的に水の中を飛びます。 しかし、最終的に、研究者はそれらをまったく別の動物にちなんで名付けました。 「バタフライボット」は、バタフライストロークを行う人間の腕に似ていると考えられています [see: the above image].
ロボットの 2 つのバージョンが構築されました。 1 つ目は速度を重視して設計されており、1 秒あたり 3.74 体の長さを移動できます。これは、1 体の長さを移動するのに苦労するソフト ロボットを大幅に上回る速度です。 より制御しやすいように設計された秒針は、1 秒間に約 1.7 体の長さ移動します。 最初のケースでは、デザインが問題になります。 2 つ目では、チームは 2 つ目のドライブ トレインを追加して、一度に 1 つの翼を羽ばたかせることでロボットを回転させました。
「これまでのところ、泳ぐソフトロボットは 1 秒あたり 1 体の長さより速く泳ぐことはできませんでしたが、オニイトマキエイなどの海洋動物は、はるかに速く効率的に泳ぐことができます」と、論文の共著者である Jie は述べています。 Yin はリリースで述べています。 「これらの動物の生体力学を利用して、より高速でエネルギー効率の高いソフト ロボットを開発できるかどうかを確認したかったのです。 私たちが開発したプロトタイプは非常にうまく機能します。」
胴体は空気式エア チューブ システムを使用して上下に曲げられ、翼/フィンが曲げられ、システムが前方に推進されます。 Yin 氏は次のように付け加えています。 私たちのアプローチは、中心体を動かすことによって受動的に駆動される双安定翼を使用します。 これは、軽量化につながるシンプルな設計を可能にするため、重要な違いです。」
チームは、ソフト スイミング バタフライ ロボットの自律的で拘束されていないバージョンに取り組んでいると述べています。