MIT の Alfonso Parra Rubio からの興味深いコメントがあります。 理由は明らかだと思いますが、テクノロジーについて考えると、少し…二者択一になりがちです。 確かに、私たちは伝統的にソフトロボットを、より伝統的な対応物と正反対に存在するものと見なしてきました.
しかし、彼らにインスピレーションを与える有機的な存在は、多くの場合、硬直と軟弱の組み合わせです。 結局のところ、硬い骨格構造に束縛された軟組織の束ではない場合、私たちは何者なのか. したがって、ロボット工学者は、両方の長所を活用するために、この 2 つをうまく組み合わせることができます。
画像クレジット: MIT
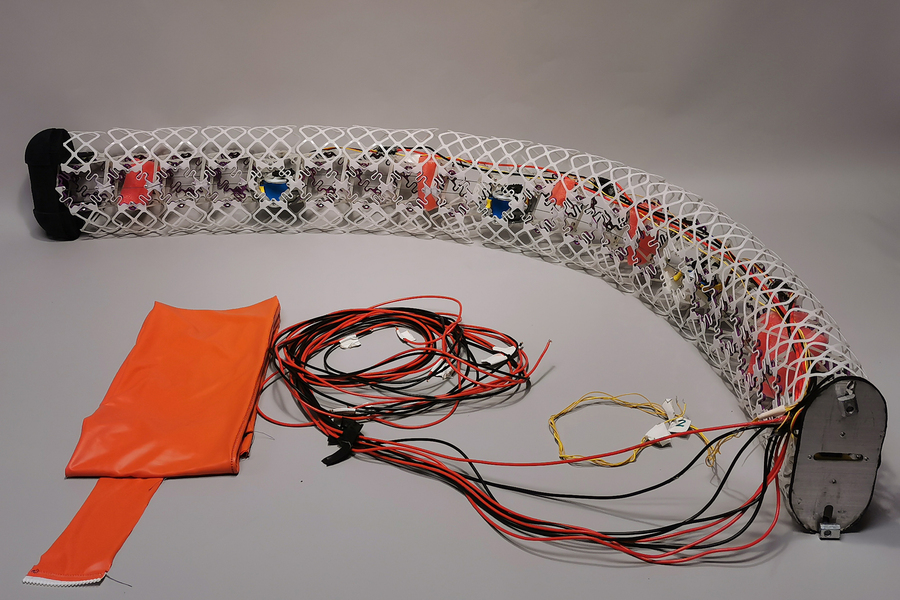
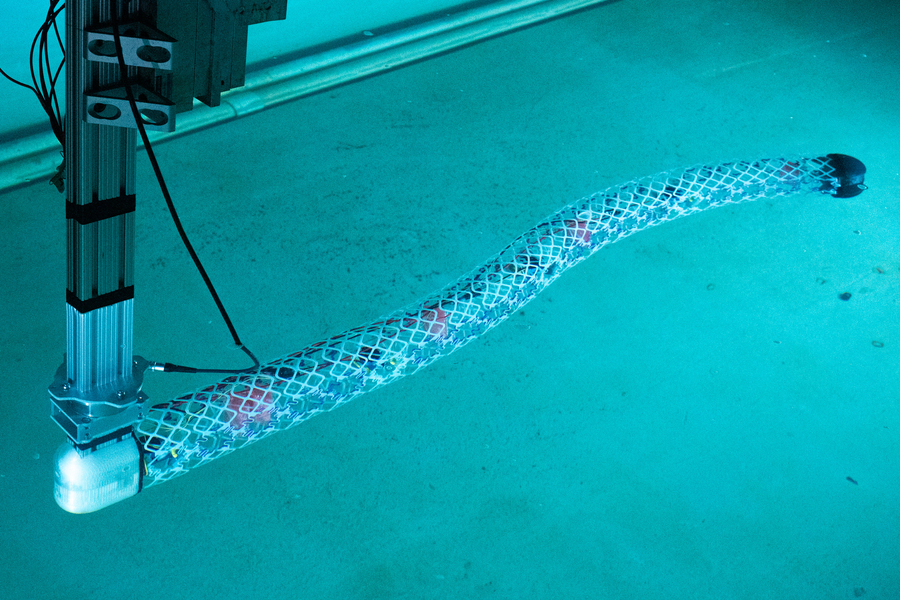
これは、MIT が水中のヘビのようなアクアボットを最近再考した際の指針となる原則の 1 つです。 ロボットは大部分が中空で、モジュール式のボクセルで構築されており、これらを組み立てて、特定の方向では硬く、他の方向では軟らかく、硬い要素と柔軟な要素を組み合わせるシステムを作成できます。
MIT の RoboTuna プロジェクトに以前関与していた MIT 教授 Michael Triantafyllou は、次のように述べています。
これまでのところ、このシステムは、この投稿に見られる長さ 1 メートルのウナギのようなデザインに構成されていますが、モジュール式のビルディング ブロックは、さまざまな形状を作成し、ロボットのサイズを大幅に拡大できることを意味します。
仲間の MIT 教授である Neil Gershenfeld 氏は、「これまでにも多くのヘビのようなロボットがありました。 「しかし、スケーラブルなこれらの単純なビルディング ブロックとは対照的に、それらは通常、特注のコンポーネントで作られています。」
また、モジュール性は、これらのロボットの構築に必要な組み立て時間を劇的に短縮することを意味する可能性もあります。 このシステムの 60 個の部品は、RoboTuna の構築に 2 年かかったのではなく、2 日で組み立てられました。