
今週はじめ、トヨタ総合研究所は、ベイエリアのオフィスの扉を初めてメディアのメンバーに開放しました。 ドライビング シミュレーターやドリフト インストラクターから、機械学習や持続可能性に関する会話まで、さまざまなデモが行われた 1 日でした。
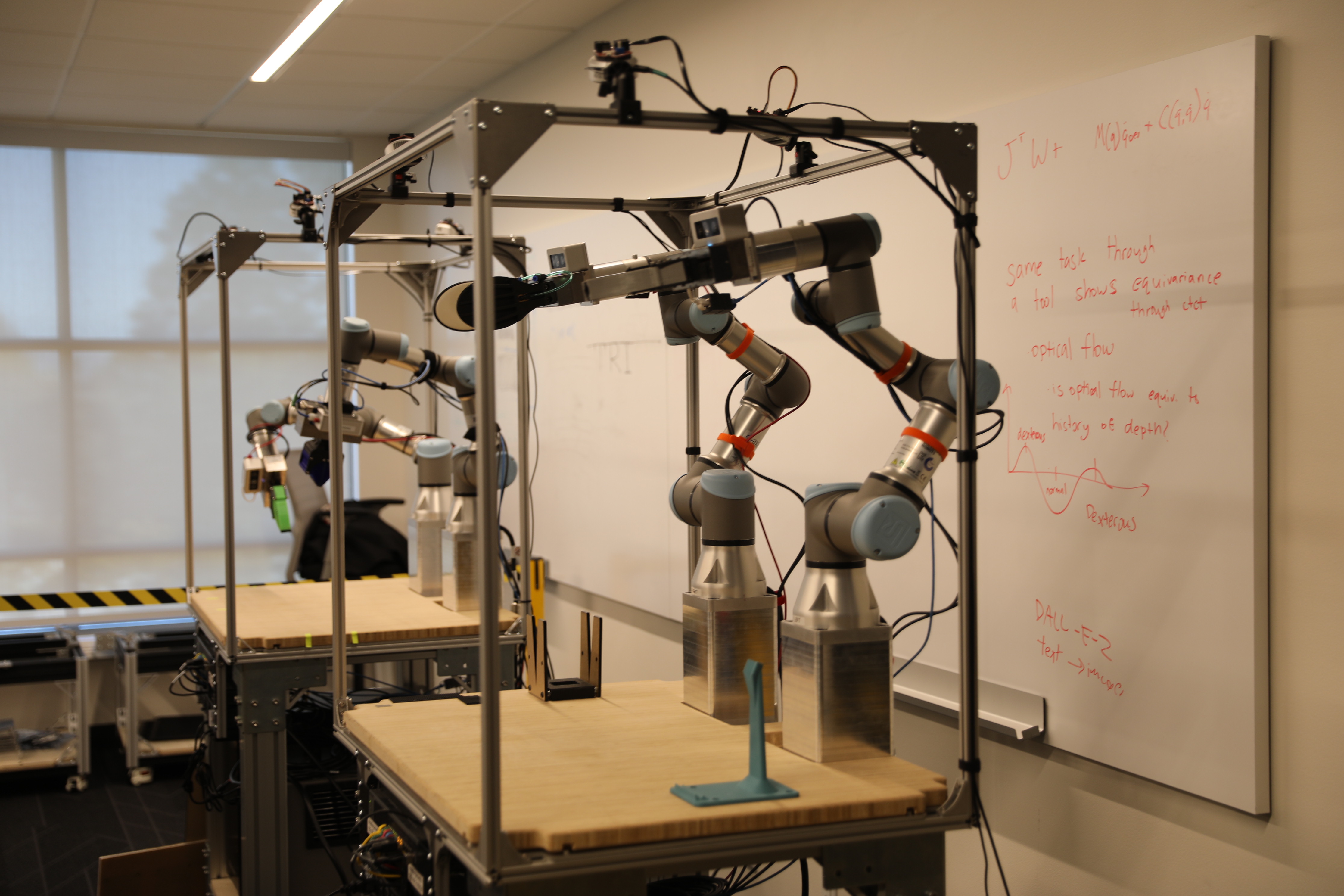
トヨタの研究部門の長年の焦点であるロボティクスも展示されていました。 SVP の Max Bajracharya は、2 つのプロジェクトを紹介しました。 1つ目は、トヨタに期待されるものに近いものでした。トラックの後部から近くのコンベアベルトに箱を移動するという驚くほど複雑な作業のために設計された、改良されたグリッパーを備えた産業用アームです。これは、ほとんどの工場が自動化を望んでいるものです。未来。
もう 1 つは、もう少し驚くべきことです。少なくとも、部門の仕事をそれほど詳しく追っていない人にとっては。 ショッピング ロボットは、バーコードと一般的な場所に基づいて、棚にあるさまざまな商品を取り出します。 システムは、さまざまなオブジェクトをつかんでバスケットに入れるための最良の方法を決定する前に、アイテムを見つけるために一番上の棚に拡張できます。
このシステムは、50 人のロボット チームが高齢者ケアに重点を置いていることから直接派生したものであり、日本の高齢化社会に対処することを目的としています。 ただし、これは、皿洗いや食事の準備などの家事を実行するように設計されたロボットを構築するという当初の仕事からの転換を表しています。
今週初めに TechCrunch で公開された記事で、そのピボットのより長い記事を読むことができます。 これは、Bajracharya との会話から引き出されたもので、以下により完全な状態で印刷しています。 テキストは、明確さと長さのために編集されていることに注意してください。

画像クレジット: ブライアン・ヒーター
TechCrunch: 家庭用ロボットのデモを手に入れたいと思っていました。
Max Bajracharya: 私たちはまだいくつかの家庭用ロボットのことをやっています[…] 私たちが行ってきたことは変わりました。 ホームは、私たちの最初のチャレンジ タスクの 1 つでした。
エルダーケアは最初の柱でした。
絶対。 その過程で学んだことの 1 つは、自分たちの進歩をうまく測定できなかったということです。 家はとても大変です。 チャレンジ タスクを選ぶのは、難しいからです。 家の問題は、それが難しすぎたということではありません。 私たちが行っている進歩を測定するのが難しすぎたということでした. 私たちは多くのことを試しました。 手続き的にめちゃくちゃにしてみました。 私たちは小麦粉と米をテーブルに置き、それらを拭き取ろうとしました。 ロボットを整頓するために、家のいたるところに物を置きました。 私たちはAirbnbに参加して、うまくいっているかどうかを確認していましたが、問題は、毎回同じ家に帰ることができなかったことです. しかし、もしそうなら、私たちはその家に過度に適合するでしょう.
毎回同じ家に帰らないことが理想ではありませんか?
その通りですが、問題は、自分たちがどれだけうまくやっていたかを測定できなかったことです。 この家の片付けが少し上手になったとしましょう。それが私たちの能力が向上したためなのか、それともその家が少し簡単になったからなのかはわかりません。 私たちは「デモを見せて、クールなビデオを見せて。 私たちはまだ十分ではありません。これはクールなビデオです。」 順調に進んでいるかどうかはわかりませんでした。 私たちが言った食料品の課題タスクでは、家と同じくらい難しいか、家と同じ代表的な問題を抱えている環境が必要ですが、どれだけ進歩しているかを測定できる場所が必要です.
家庭やスーパーマーケットの特定の目標について話しているわけではありませんが、これらの両方の場所にまたがる可能性のある問題を解決しています。
あるいは、ロボット工学の最先端を推進しているかどうかを測定することさえできます. 私たちは、実際には汎用的な認識、動作計画、行動を行うことができますか. 正直に言うと、チャレンジ問題はどうでもいいです。 DARPA ロボティクス チャレンジ、それらは難しい作りのタスクでした。 チャレンジタスクもそうです。 私たちが家を気に入っているのは、私たちが最終的に家で人々を助けたいと思っている場所を代表しているためです。 しかし、それは家である必要はありません。 食料品市場は非常に多様であるため、非常に良い例です。

画像クレジット: ブライアン・ヒーター
しかし、フラストレーションがあります。 これらの課題がどれほど困難で、物事がどれほど遠いものであるかはわかっていますが、ランダムな人があなたのビデオを見て、あなたがそれを伝えることができなくても、突然それは地平線の向こうにあるものです.
絶対。 だからギル [Pratt] は毎回、「なぜこれがチャレンジ タスクなのかをもう一度強調してください」と言います。
それを普通の人にどう訳しますか? 普通の人は挑戦的なタスクに夢中になることはありません。
その通りですが、今日ご覧になったデモンストレーションでは、チャレンジ タスクを示そうとしましたが、そのチャレンジから得られた機能をコンテナのアンロードなどの実際のアプリケーションに適用する方法の一例も示しました。 それは本当の問題です。 私たちは工場に行き、彼らは「はい、これは問題です。 手伝ってくれる?’ そして、私たちは、そうです、それに適用できる技術を持っていると言いました。 そこで今、私たちはこれらの課題から、私たちが重要だと考えるいくつかのブレークスルーを示し、それらを実際のアプリケーションに適用しようとしています. そして、それは人々がそれを理解するのに役立っていると思います。
ロボティクスチームの規模はどのくらいですか?
部門は、こことマサチューセッツ州ケンブリッジの間で約 50 人が均等に分割されています。
多目的の人型ロボットを作ろうとしているテスラやフィギュアのような例があります。 違う方向に向かっているようです。
若干。 私たちが観察したことの1つは、世界は人間のために構築されているということです. 白紙の状態になったばかりなら、私が人間の空間で働くロボットを作りたいと言っているのです。 あなたは人間のプロポーションと人間レベルの能力で終わる傾向があります. 必ずしもそれが最適な解決策だからではありません。 それは、世界が人々を中心に設計されているからです。
画像クレジット: 豊田研究所
マイルストーンをどのように測定しますか? あなたのチームにとって成功とはどのようなものですか?
自宅から食料品店への移動は、その好例です。 私たちは家で進歩を遂げていましたが、食料品店に移動したときほど速くも明確でもありませんでした. 私たちが食料品店に移動すると、あなたがどれだけうまくやっているか、そしてあなたのシステムに本当の問題が何であるかが本当に明らかになります. そして、それらの問題を解決することに本当に集中できます。 トヨタの物流施設と製造施設の両方を見学したとき、少し異なる点を除いて、基本的に食料品の買い物の課題であるこれらの機会をすべて見ました. 現在、部品は食料品ではなく、部品はすべて配送センターの部品です。
1,000 人から聞いた話では、ホーム ロボットは非常に難しいものですが、自分で試してみる必要があると感じ、彼らと同じ過ちを犯してしまいます。
私はおそらく他のみんなと同じくらい有罪だと思います。 それは、今では GPU が優れているということです。 ああ、私たちは機械学習を手に入れたので、これができることがわかりました。 ああ、それは私たちが思っていたよりも難しかったのかもしれません。
ある時点で何かがそれをひっくり返さなければなりません。
多分。 長い時間がかかると思います。 自動運転と同じように、特効薬はないと思います。 このような魔法のようなものではなく、「よし、解決した」ということです。 それは少しずつ削り取られ、徐々に削られていきます。 だからこそ、そのようなロードマップを短いタイムラインで持つことが重要なのです。マイルストーンを短くすることで、小さな成果を得ることができます。そうすることで、長期的なビジョンを実際に達成するために取り組み続けることができます。
これらの技術を実際に製品化するプロセスはどのようなものですか?
これは私たち自身が答えようとしている非常に良い質問です。 私たちは今、風景をある程度理解していると思います。 多分私は最初はナイーブで、よし、この技術を第三者またはトヨタの内部の誰かに渡すつもりであるこの人を見つける必要があるだけだと考えていました. しかし、それが何であれ、それがビジネスユニットであろうと、企業であろうと、スタートアップであろうと、トヨタ内のユニットであろうと、それらは存在しないように見えることを私たちは学んだと思います. ですから、私たちは創造の方法を見つけようとしていますが、それは TRI-AD の話でもあると思います。 これは、私たちが行っていた自動運転の研究をより現実的なものに変換するために作成されました。 ロボット工学や、私たちが取り組んでいる多くの高度な技術でも同じ問題を抱えています。
画像クレジット: ブライアン・ヒーター
スピンオフできる場所にたどり着く可能性について考えています。
潜在的に。 しかし、それは技術を商業化するための主要なメカニズムではありません。
主なメカニズムは何ですか?
わかりません。 答えは、私たちが行っていることの多様性は、グループごとに異なる可能性が非常に高いということです.
TRIは創業以来どのように変化しましたか?
私が最初に始めたとき、私たちは明らかにロボティクスの研究をしていたように感じました。 その理由の 1 つは、人間の環境で現実世界のほとんどすべての困難なアプリケーションに適用できるテクノロジからはほど遠いことです。 この 5 年間で、私たちはこの非常に困難な問題に十分な進歩を遂げてきたので、実際のアプリケーションに変わり始めていると感じています。 私たちは意識的にシフトしました。 私たちはまだ 80% 研究で最先端を推し進めていますが、その研究が私たちが思っているほど優れているかどうか、そしてそれが実際に適用できるかどうかを判断するために、私たちのリソースのおそらく 20% を割り当てています。 -世界のアプリケーション。 失敗するかもしれません。 いくつかの興味深いブレイクスルーを達成したと思っていたことに気付くかもしれませんが、信頼性や速度が十分ではありません。 しかし、私たちは努力の 20% を試行に費やしています。
高齢者介護はこれにどのように適合しますか?
ある意味では、それは今でも私たちの北極星です。 プロジェクトは、私たちが最終的に家で人々を増幅する方法をまだ検討しています. しかし、時間が経つにつれて、これらのチャレンジ タスクを選択するときに、これらの他の分野に適用できるものが少しずつ出てきた場合、これらの短期的なマイルストーンを使用して、私たちが行っている研究の進捗状況を示しています。
完全な消灯要素の可能性はどの程度現実的ですか?
将来、ゼロから始められるようになれば、その可能性もあると思います。 今日の製造業、特にトヨタの製造業を見てみると、それに近づくことはまずありません。 私たち [told factory workers]、私たちはロボット技術を構築していますが、それはどこに適用できると思いますか? 彼らは私たちに非常に多くのプロセスを見せてくれました。たとえば、このワイヤー ハーネスをここに通し、ここに引き出し、ここにクリップし、ここにクリップし、ここに取り、ここでそれを取得し、次のように実行します。 そして、これは人がスキルを習得するのに5日かかります. 私たちは、「ええ、それはロボット技術には難しすぎる」という感じでした。
しかし、人々にとって最も困難なことは、自動化したいものです。
はい、困難または怪我をしやすい可能性があります。 確かに、最終的にはそこに到達するための足がかりを作りたいと考えていますが、今日のロボット技術を見る限り、それにはほど遠い状態です。