ブログで 先週公開された記事、 メタ質問、「ロボットはどこ?」 答えは簡単です。 彼らは来た。 どこを見ればよいかを知る必要があります。 腹立たしい回答です。 私はそれを認識しています。 車や運転支援についての会話は脇に置いて、私たち全員がロボットであることに同意する傾向があることに焦点を当てましょう. まず第一に、Amazon の配達はロボットの支援なしでは実現できません。
より適切な質問は次のとおりです。なぜロボットが増えないのですか? もっと言えば、なぜ私の家にはロボットが増えていないのでしょうか? これは複雑な問題であり、多くのニュアンスがあります。その多くは、「汎用」ロボットの概念に関する現在のハードウェア制限の状態に帰着します。 ルンバはロボットです。 世界中にはたくさんのルンバがありますが、それは主にルンバが 1 つのことを得意とするためです (さらに 10 年間の研究開発により、「かなり良い」状態から物事が前進しました)。
質問の前提に欠陥があるというほどではありません。それは、少し再構成するという問題です。 「どうしてロボットが増えないの?」 非ロボット主義者が尋ねるのは完全に有効な質問です。 長年のハードウェア担当者として、私は通常、そこから答えを始めます。 過去 10 年間、私は十分な数の会話をしてきたので、ロボット グリッパーの多くの潜在的な障害点について話し合う会話全体を独り占めできるとかなり自信を持っています。
Meta の見解はソフトウェア ベースであり、それで十分です。 過去数年間、ロボット学習、展開/管理、ノーコードおよびローコード ソリューションなど、さまざまな重要なカテゴリに取り組むスタートアップが爆発的に増加するのを目の当たりにしてきました。 ここでは、ROS の作成、維持、および改善に費やされた約 20 年間の研究開発への永遠の叫びです。 適切なことに、長年スチュワードを務めてきた Open Robotics は Alphabet に買収されました。Alphabet は、自作の取り組みである Intrinsic および Everyday Robots を通じて、このカテゴリで独自の作業を行ってきました (ただし、組織全体のリソース削減によって不釣り合いなほどの影響を受けました)。
Meta/Facebook は間違いなく、頻繁に表面化するスカンクワーク プロジェクトの独自のシェアを行っています。 Alphabet / Google が何年にもわたって調査してきた規模に達していることを示唆するようなものは今のところ見たことがありませんが、これらのプロジェクトのいくつかが頭角を現すのを見るのは常に興味深いことです。 ジェネレーティブ AI の議論の急増に関連しているのではないかと強く疑う発表の中で、ソーシャル メディアの巨人は、「挑戦的な感覚運動スキルを実行できる、汎用の身体化された AI エージェントに向けた 2 つの主要な進歩」と呼ぶものを共有しました。
ここで直接引用:
人工視覚皮質 (VC-1 と呼ばれる): 多様な範囲の感覚運動スキル、環境、および具体化を初めてサポートする単一の知覚モデル。 VC-1 は、Meta AI とアカデミック パートナーによって作成された画期的な Ego4D データセットから日常のタスクを実行している人々のビデオでトレーニングされています。 また、VC-1 は、仮想環境での 17 の異なる感覚運動タスクで、最もよく知られている結果に匹敵するか、それを上回ります。
アダプティブ (感覚運動) スキル調整 (ASC) と呼ばれる新しいアプローチは、ロボットの移動操作 (オブジェクトに移動する、それを拾う、別の場所に移動する、オブジェクトを配置する) という困難なタスクで、ほぼ完璧なパフォーマンス (98% の成功) を達成します。オブジェクト、繰り返し)物理的な環境で。
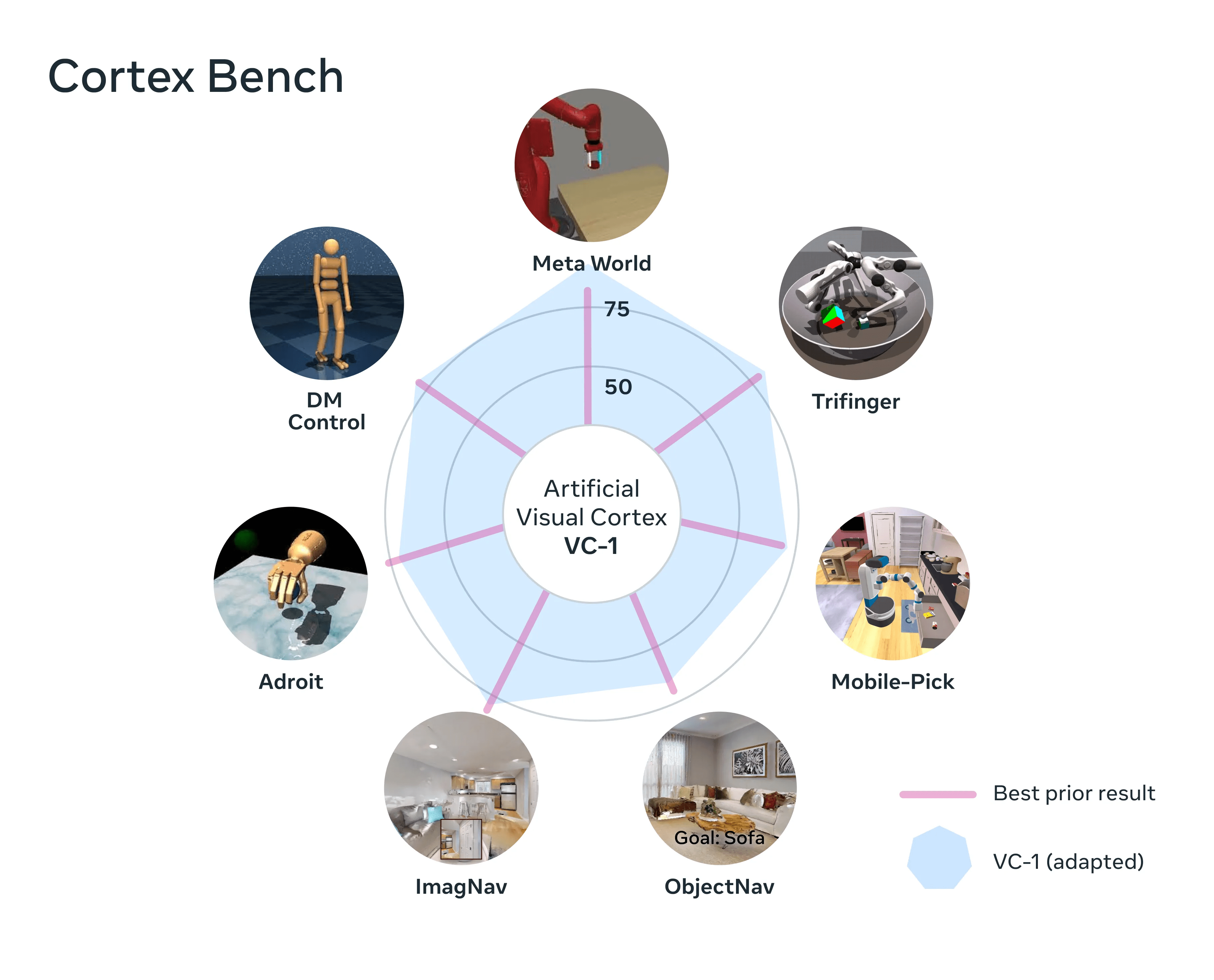
画像クレジット: メタ
興味深い研究であることは疑いの余地がありません。私は、これらのいくつかを掘り下げて前進できることを楽しみにしています。 最近、「汎用」という言葉がよく使われています。 これは、ロボット工学の会話で常に興味深いトピックですが、Tesla ボットの発表をきっかけに、木工品から出てきた汎用ヒューマノイド ロボットが急増しています。 何年もの間、人々は私に「マスクについて何と言おうと、しかしテスラは EV への新たな関心を駆り立てた」のようなことを言ってきました。 これは、フォームファクターに関する議論を更新するという重要な二重の役割を果たしましたが、これがどれほど難しいかを説明するときに指す明確なビジュアルを提供します. 大衆の期待を大幅に高めながら、同時にそれを和らげることは可能でしょうか?
繰り返しになりますが、これらの会話は、これらすべての GPT のブレークスルーとうまく一致しています。 これらはすべて非常に印象的ですが、Rodney Brooks は、数週間前のこのニュースレターで、物事を混同する危険性を非常にうまく説明しました。 彼らはパフォーマンスを能力と勘違いしています。 人間の優れたパフォーマンスを見ると、彼らが何を得意としているかがわかります。 私たちは人をモデル化するのが得意ですが、同じモデルは当てはまりません。 これらのシステムの 1 つから素晴らしいパフォーマンスが見られますが、それが周囲の隣接する空間や異なるデータでどのように機能するかはわかりません。」
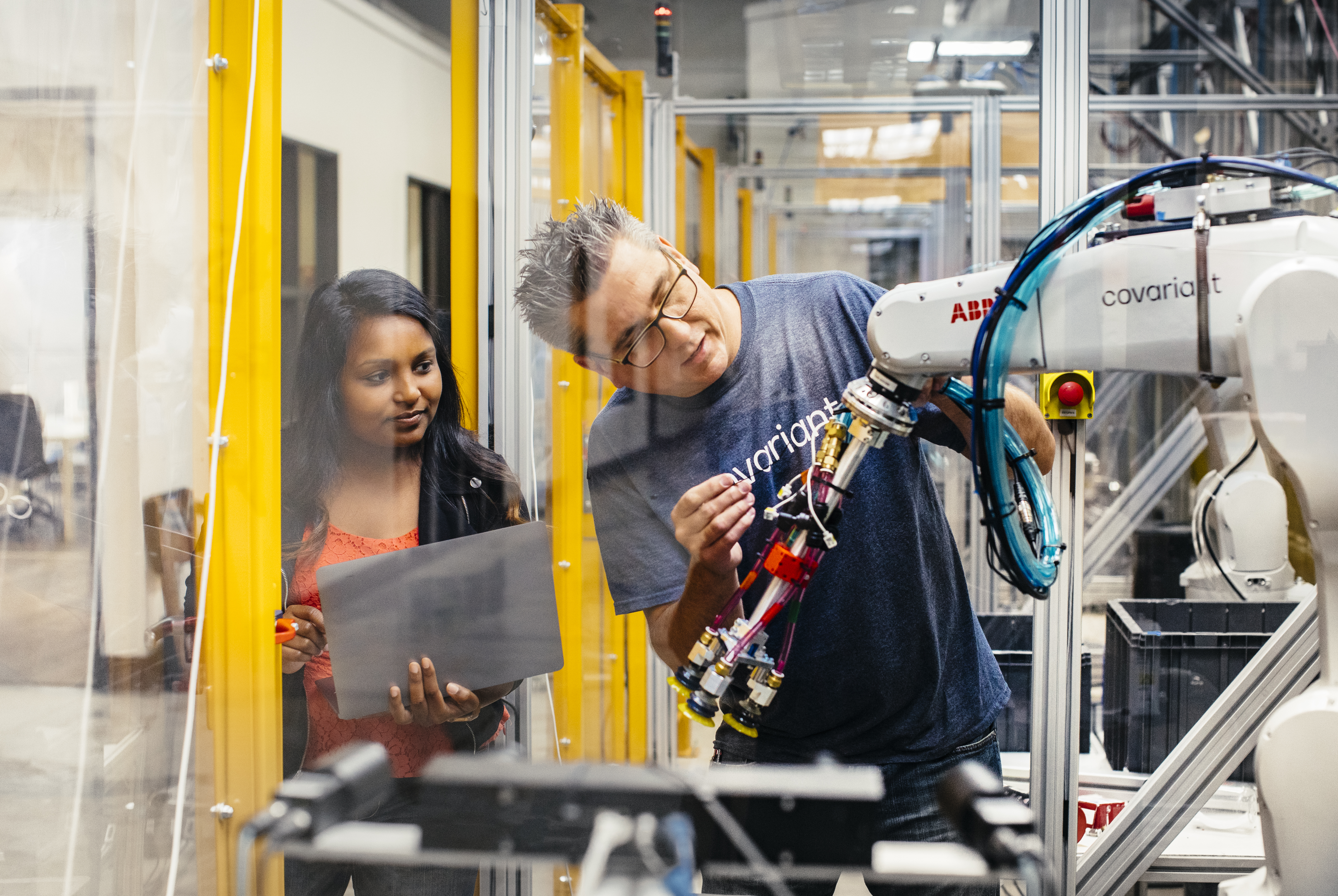
画像クレジット: 共変
明らかに、私は ProMat で私が話したほとんどの人々に、ロボティクスにおけるジェネレーティブ AI の将来の役割に対する彼らの見解を尋ねるのをやめさせませんでした. 答えは でした。 . . 広範囲。 肩をすくめる人もいれば、テクノロジーの役割は非常に統制されていると考える人もいれば、これらすべてが将来に何を意味するかについて依然として非常に強気な人もいます. 先週のニュースレターで、Covariant の CEO である Peter Chen (最近 7,500 万ドルを調達した) は、一般化された AI に関していくつかの興味深いコンテキストを提供しました。
最近の ChatGPT が登場する前は、自然言語処理 AI がたくさんありました。 検索、翻訳、センチメント検出、スパム検出など、世の中にはたくさんの自然言語 AI がありました。 GPT の前のアプローチは、ユースケースごとに、データの小さなサブセットを使用して特定の AI をトレーニングすることです。 今の結果を見ると、GPT は基本的に翻訳の分野を廃止しており、翻訳するように訓練されていません。 基盤モデルのアプローチは基本的に、1 つの状況に固有の少量のデータを使用したり、1 つの状況に固有のモデルをトレーニングしたりするのではなく、より多くのデータで大規模な基盤の一般化モデルをトレーニングして、AI をより一般化します。
もちろん、Covariant は現在、ピッキングとプレースメントに非常に重点を置いています。 率直に言って、彼らを長期間占有し続けるのは十分に大きな挑戦です. しかし、このオファーのようなプロミス システムの 1 つは、実世界でのトレーニングです。 現実の世界で実際の仕事をしている実際のロボットを実際に所有している企業は、マシンが周囲の世界とどのように相互作用するかについて、非常に強力なデータベースとモデルを構築しています (研究施設の壁は、この点で制限する可能性があります)。
研究者や企業によって強化されている一見バラバラに見えるビルディング ブロックの数が、いつの日か集まって真の汎用システムを作成する可能性があることは想像に難くありません。 ハードウェアと AI がそのレベルに達すると、それらをトレーニングするためのフィールド データが無限にあるように見えます。 私は、ProMat のフロアでロボットの名簿のミキシングとマッチングを少し行い、現在の市販技術の状態にどれだけ近いかを判断しようとしたことを認めます.
当分の間、プラットフォームのアプローチは非常に理にかなっています。 たとえば、Spot を使用して、Boston Dynamics は効果的に iPhone モデルの顧客を販売しています。 まず、印象的なハードウェアの第 1 世代を作成します。 次に、関係者に SDK を提供します。 計画通りに進めば、突然、チームが想像もしなかったことをこの製品で実行できるようになります。 (BDのガイドラインに従って)製品の背面に銃を取り付ける必要がないと仮定すると、それはエキサイティングな提案です.

画像クレジット: 1X
はっきりしたことを言うのは時期尚早 1X TechnologiesのNEOロボット、ロボティクスとジェネレーティブ AI の境界線で生きていきたいと同社が望んでいるという事実を超えて。 確かにOpenAIには強力な味方がいます。 ジェネレーティブ AI の巨人のスタートアップ ファンドは、2,350 万ドルのラウンドを主導し、Tiger Global なども参加しました。
1X の創設者兼 CEO である Bernt Øivind Børnich は次のように述べています。 投資家の支援を受けて、私たちはロボット工学の分野で大きな進歩を遂げ、世界の労働市場を拡大し続けます。」
これに関する 1 つの興味深い注意事項 (少なくとも私にとって) は、1X が実際に 1 分間動き回っていることです。 ノルウェーの会社は、ごく最近まで Halodi として知られていました (正確には 一ヶ月前)卑劣なブランド変更。 会社が開発していたヒューマノイド フォーム ファクターの始まりを確認するには、1 年か 2 年遡る必要があります。 フードサービス用. この技術は間違いなく2021年の対応物よりも洗練されているように見えますが、車輪付きのベースは、レンダリングされた場合に見られるロボットのバージョンに到達するためにどれだけ遠くに行く必要があるかを示しています.
ちなみに、私かもしれませんが、ここでいくつかの収束進化が起こっているようです。
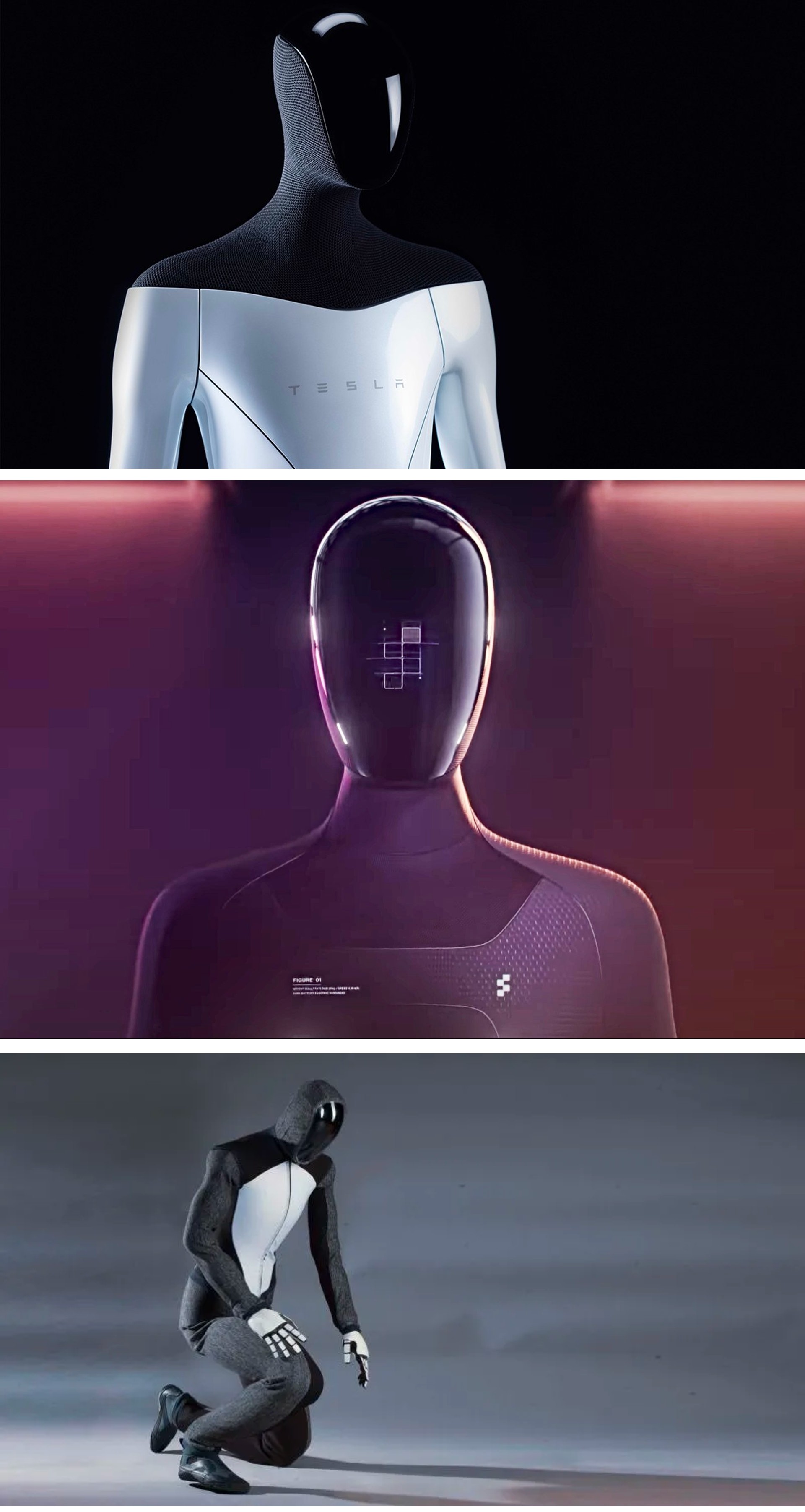
画像クレジット: Tesla/Figure/IX — 著者によるコラージュ
上から順に、Tesla Optimus、Figure 01、1X Neo のレンダリングです。 もちろん、直接のコピーではありませんが、従兄弟のように見えることは確かです。 ネオは、フォーマルな場でもパーカーを着ることにこだわっています. 聞いてください、私は工業デザイナーではありませんが、カウボーイハットか何かについてはどうですか?

画像クレジット: MIT CSAIL
2 つの研究プロジェクトで 1 週間のニュースを締めくくるにはどうすればよいでしょうか。 1 つ目は MIT の楽しいものです。 よく考えてみると、サッカーをすることは運動能力をテストするのに最適な方法です。 ロボカップが 20 年近くも続いているのには理由があります。 ただし、Dribblebot の場合は、草、泥、砂などの起伏のある地形が課題です。
マサチューセッツ工科大学のプルキット・アグラワル教授は次のように述べています。
今日周りを見渡すと、ほとんどのロボットは車輪付きです。 しかし、災害シナリオ、洪水、または地震があり、ロボットが捜索および救助プロセスで人間を支援することを想像してみてください。 平らではない地形を移動するには機械が必要ですが、車輪付きのロボットはそれらの地形を横断できません。 脚付きロボットを研究する上で重要なことは、現在のロボット システムでは手の届かない場所に行くことです。

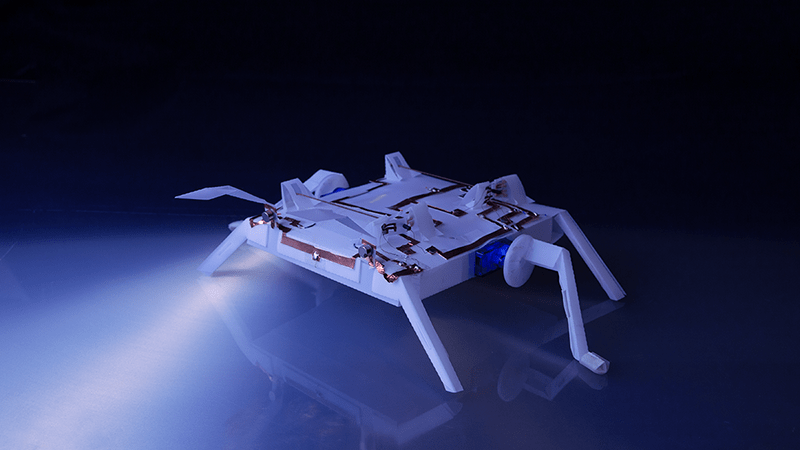
画像クレジット: UCLA
2 つ目の研究プロジェクトは、UCLA の Samueli School of Engineering によるものです。 最近出版された 折り紙ロボットの周りの作業からの発見。 Origami MechanoBots、または「OrigaMechs」は、薄いポリエステルのビルディング ブロックに埋め込まれたセンサーに依存しています。 主任研究員の Ankur Mehta 氏は、この技術についてかなり先の計画を立てています。
「自然災害や人災の際など、この種の危険または予測不可能なシナリオでは、折り紙ロボットが特に有用であることが証明される可能性があります」と彼はニュースに関連付けられた投稿で述べました. 「ロボットは特殊な機能向けに設計され、オンデマンドで非常に迅速に製造される可能性があります。 また、それは非常に遠い道のりですが、他の惑星には、これらのシナリオの影響を受けない探査ロボットが非常に望ましい環境が存在する可能性があります。」
それは金星の表面ではありませんが、獲物を感知するハエトリグサはそれにもかかわらずかなりきれいです。
ジョブ
よし、新しい求人情報はどうだ? 今後も、これらを定期的にチャンクで継続する予定です。 リストを取得するための最良の方法は、 LinkedIn でフォローしてください 新しい仕事が近づいていることを私が発表するスレッドに応答します。 これは確かに最も効率的な方法ではありませんが、私にとってはうまくいっているので、この方法を続けるつもりです。
今週も申し上げましたが、これまでに取り上げられたことのない方を優先させていただきます。
人間のためのロボットの仕事
エスケープ (14役)
アプリトロニク (20役)
器用さ (18役)
ジギタリス (3役)
ファントムオート (21役)
サンクチュアリ AI (15役)
スラムコア (5役)
豊田織 (4役)
画像クレジット: ブライス・ダービン/TechCrunch
さあ、アクチュエーターで遠い世界を探検しましょう。 ここで購読してください。