
ジェフ・カルデナスが引っ張る 彼のMacBookを取り出しました。 Apptronik の共同創設者兼 CEO は、オースティンのスタートアップの 7 年間の歴史をたどるスライドショーを見せたいと考えています。 確かに、少し文脈を理解する必要があります。 他の多くのロボット企業と同様、同社も初期の頃は政府との契約によって支えられていました。
最初に登場したのは、NASA の人型宇宙ロボットの 2 番目のバージョンである Valkyrie 2 でした。 この若い会社は、そのシステムの実現を支援する任務を負った数少ない会社の 1 つでした。 このパズルに貢献したのは、Apptronik の共同創設者で主任研究員の Luis Sentis 氏が率いるテキサス大学の人間中心ロボット研究室で開発された液冷ロボット アクチュエータです。
次は外骨格です。 「アイアンマンスーツ」の市場に出ていた米国特殊作戦軍(USSOCOM)。
画像クレジット: ブライアン・ヒーター
「[The]外骨格は液体で冷却されました」とカルデナス氏は言います。 「そうすることで私たちは多くのことを学びました。 システムの複雑さが高すぎました。 重かったです。 すべてのアクチュエーターを遠隔化しました。 そして私たちは、人型ロボットの最も単純なバージョンであるモバイル マニピュレーターが何であるかを認識し始めました。 私たちは、武器の製造にお金を払いたくない物流関係の多くの人々からアプローチを受けるようになりました。 彼らは必要なものに対して正確すぎました。 彼らが望んでいたのは、手頃な価格のロボット物流アームでした。」
工業用兵器はおよそ 60 年間存在し、はるかに槍の先端でした。 その当時、Fanuc や Kuka などのメーカーはミリメートル単位の精度を設計してきました。 これは製造業にとっては不可欠なことですが、ほとんどの物流作業では過剰な作業です。 たとえば、自動車の電気システムの設置には、ボックスを点 a から点 b に移動するよりもはるかに高い精度が必要です。
「多くの人が人型ロボットで行っていることは、基本的に、私たちが長い間産業用ロボットアームを構築してきたのと同じ方法でロボットを構築しようとしているのです」とカルデナス氏は言います。 「Apptronik の重要なアイデアの 1 つは、これらのロボットを構築する必要がある方法 (自由度 30 のシステムがある場合) が根本的に異なるということです。 必要なものは異なります。 人間の周囲で動物が安全であること、周囲の環境に対して非常に堅牢であることが必要です。 エネルギー効率の高い製品が必要です。 これは、私たちが最適化しようとしている新しい制約セットです。 世の中にあるすべての兵器と同じアーキテクチャを採用 [at Automate] そしてそれを外挿するのは意味がありません。 これは根本的に異なるアーキテクチャであり、アクチュエータあたりのコンポーネントが約 3 分の 1 少なくなり、組み立て時間は約 3 分の 1 になります。」
画像クレジット: アプトロニク
さまざまな理由から、物流は Apptronik のような企業にとって論理的な着地点となります。 誰もが政府との契約によって永遠に維持されることを望んでいるわけではありません。 ここ数年、物流/フルフィルメントはロボット分野で最も人気のあるカテゴリーとしての地位を確立しました。 研究から商用製品の世界に舵を切った他の無数の企業と同様に、同社は、自社が生み出しているテクノロジーに適切な市場が存在するかどうかを判断する必要がありました。
「目標はヒューマノイドに到達することでした」とカルデナスは言う。 「ヒューマノイドは一種の聖杯です。 おそらく、私たちが始めたときに唯一一貫していたのは、「ヒューマノイドはやらない」ということだけでした。 複雑すぎます。』 」
職場における人型ロボットの真の価値は、依然として未解決の問題です。 しかし、少なくとも、それを尋ねているのはApptronikだけではありません。 大々的に報道されたテスラのオプティマスの発表は、何かを揺るがした。 ステルスモードで運営していた企業は突然、自らの意図を発表せざるを得なくなった。 1X や Figure などのスタートアップ企業は、さまざまな範囲で自社の進歩について議論しています。 Apptronikハードウェアと提携したSanctuary AIは、すでにシステムの試験運用を開始している。
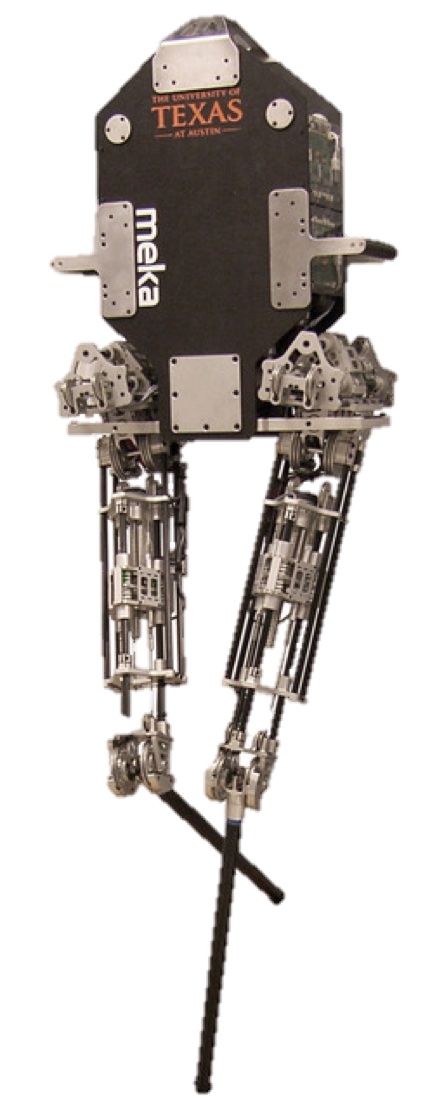
Apptronik はこれまでのところ、ロボットの 2 つの半分を披露しています。 自律移動ロボット(AMR)に搭載できる人型ロボットの上半身「Astra」がある。 もう一方の端にはドラコがいます。ドラコは文字通りすべての足です。 同社はこれを「最初の Biped」と呼んでいますが、それは事実ですが、実際にはそれだけです。
私たちの即興スライド ショーの一部は、Apptronik の研究所内を歩き回る細い脚のビデオです。 見た目からはキャシーの速度には達していませんが、純粋に目で見ると、テスラが最近のオプティマスビデオで披露したものよりも速いように見えます。 これら一見異質に見えるいくつかのプロジェクトを見て明らかになるのは、Apptronik が当初から独自の完全な人型ロボットを少しずつ構築してきたということです。

画像クレジット: アプトロニク
カルデナス氏は、同社は約40~50人の従業員に影響を与えるまで、その存続期間のほとんどを自力で行ったと述べた。 今夏の完全な人型システムの公式発表に続き、今年はシリーズAを検討する予定だ。 「私たちはこれらの構成要素をすべて持っています」と彼は付け加えました。 「その多くは反復と新しいアイデアの試みでした。 ブートストラップの利点は、私たちがこれを長い間信じてきたことです。 私たちはヴァルキリー以来、チームとして約 10 年間これに取り組んできました。」
同社は現在、発売に先立って歩行とロボットの中核機能の構築に取り組んでいる。 当然のことながら、製品を世界に公開する前に、その製品が実際に計画どおりに機能することを実証したいと考えています。 これはテスラがオプティマスに対して行ってきたこととは著しく異なるアプローチであり、すべてが計画通りに進めば、同社は次の大幅な増額に向けて推進されることになる。
カルデナスは、この夏デビューを予定しているシステムであるアポロの画像 (レンダリングと写真の両方) を私に見せてくれました。 ここでは共有できませんが、このデザインは、私が説明したような収斂進化に逆行していると言えます。Tesla、Figure、OpenAI 支援の 1X は、共通の設計言語でレンダリングを表示しています。 アポロは、一言で言えば、これらのどのシステムや、それ以前に登場した NASA のヴァルキリー ロボットよりもフレンドリーに見えます。
Astra と多くのデザイン品質を共有しています。 実際、昔ながらの iMac のような頭の形と、顔を構成するボタンの目とディスプレイの組み合わせを備えた、漫画のような美学とまで表現することさえできるかもしれません。 倉庫や工場のフロアなどの場所で動作するように設計されたこれらのシステムをほとんどの人が操作しないのは事実ですが、かっこ良く見せるために不気味さを受け入れる必要はありません。
汎用パーツはある意味人型ビットよりも硬い。 完全に可動で多関節の二足歩行ロボットの構築が想像力を駆使しても簡単だというわけではありませんが、特殊用途と汎用品の間には大きな溝があります。 後者の正確な定義についてはまた別の機会にお話ししますが、多くの人にとって、このラベルは、その場で完全に適応できるシステムを表しています。 一部の人にとって、それはサードパーティ開発者がスキルを作成するための API やアプリ ストアのようなものを意味しますが、それでもシステムは環境に適応する必要があります。 理想的には、人間ができるあらゆるタスクを実行できる機械です。
多くの場合、人々は多目的システムという広大な中間点を認識できません。 当分の間、ここはより現実的な活動の場となる。 工場で一日中働き、食料品の買い出しをし、家に帰って夕食を作ってくれるロボットというテスラの概念は、数十年にわたるSFによって支えられてきた既存の突飛な期待に影響を与えている。
「これに複数のことを実行させるには」とカルデナス氏は言います。「まだ初期段階ですが、ボックスを点 a から点 b に移動するなどの単純な動作を実行できれば、数万のユニットが存在する十分なアプリケーションがあります。」それらのアプリケーションに対する需要に相当するものです。」
この分野でのすべての作業と同様、これらの会話では、私たちがまだ非常に初期段階にあることに注意する必要があります。 敏捷性は、倉庫環境における人型 (少なくとも二足歩行) ロボットの有効性を証明するという点で、おそらく最も進歩したものです。 しかし、彼らにもまだまだ長い道のりがあります。
いずれにしても、今後数年間で、数十年に及ぶ研究の集大成がどこへ向かうのかについて、興味深い洞察が得られるでしょう。