機械学習と AI の分野の研究は、今やほとんどすべての業界や企業で重要な技術となっていますが、そのすべてを読むには膨大な量の研究が行われています。 このコラム、パーセプトロンは、最も関連性の高い最近の発見と論文のいくつかを収集することを目的としており、特に人工知能に限定されませんが、それらが重要な理由を説明します。
過去数週間にわたって、科学者たちは月の薄暗い、場合によっては真っ暗な小惑星のクレーターに関する魅力的な詳細を明らかにするアルゴリズムを開発しました。 他の場所では、MIT の研究者が教科書で AI モデルを訓練し、特定の言語の規則を独立して理解できるかどうかを確認しました。 DeepMind と Microsoft のチームは、モーション キャプチャ データを使用して、歩行などの特定のタスクの実行方法をロボットに教えることができるかどうかを調査しました。
アルテミス I の打ち上げが保留されている (そして予想通り遅れている) ことで、月の科学が再び脚光を浴びています。 しかし、皮肉なことに、月の最も暗い領域は、無数の目的に使用できる水の氷を収容している可能性があるため、最も興味深い可能性があります。 暗闇を見つけるのは簡単ですが、そこには何がありますか? 画像専門家の国際チームは、ML を問題に適用し、ある程度の成功を収めました。
クレーターは最も深い暗闇の中にありますが、ルナー リコネサンス オービターは内部から時折光子を捉えています。道具” Geophysical Research Letter に記載. その結果、「恒久的に陰になっている地域への目に見えるルートを設計できるようになり、アルテミスの宇宙飛行士やロボット探査機のリスクが大幅に軽減されました。」 月惑星研究所のデビッド・クリングによると.
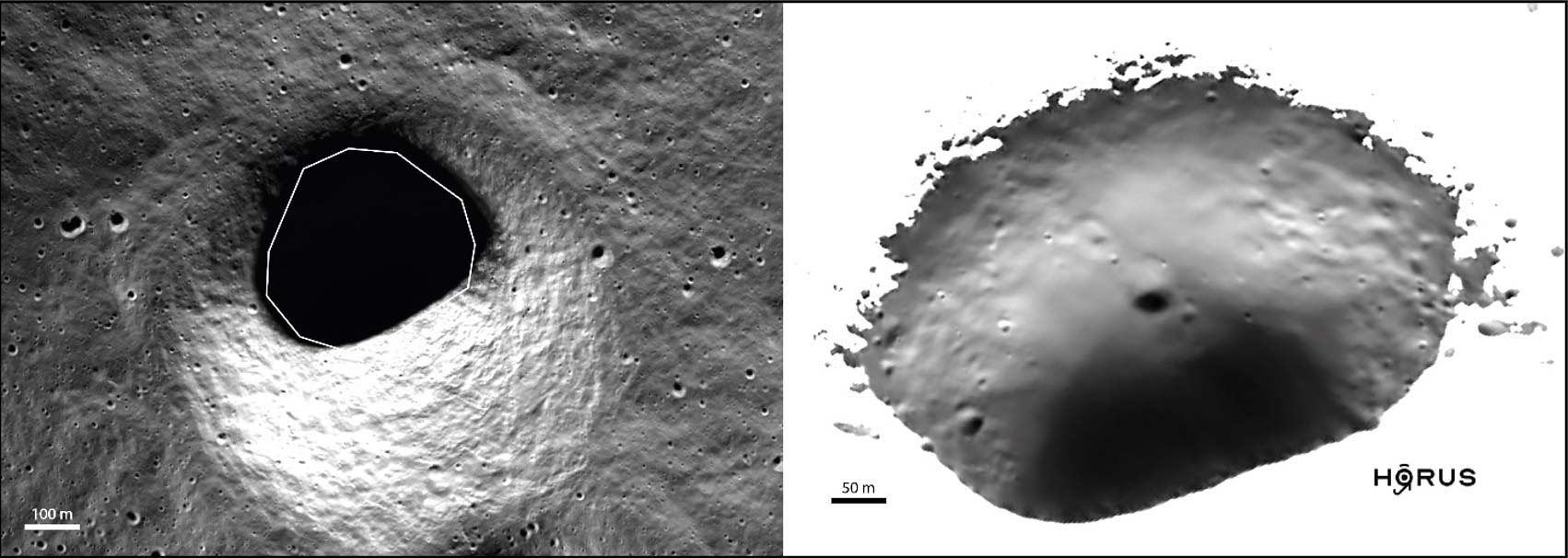
光あれ! クレーターの内部は漂遊光子から再構築されます。
彼らは懐中電灯を持っていると思いますが、事前にどこに行くべきかについての一般的な考えを持っていることは良いことです.
どんなに便利でも、まばらなデータを画像に変換することについて不思議なことは何もありません。 しかし、言語学の世界では、AI は、言語モデルが自分の知っていることを本当に知っているかどうか、またどのように知っているかという興味深い調査を進めています。 ある言語の文法を学習する場合、MIT の実験では、複数の教科書でトレーニングされたモデルが、特定の言語がどのように機能するかについての独自のモデルを構築でき、たとえばポーランド語の文法が教科書の問題にうまく答えることができることがわかりました。それについて。
「言語学者は、人間の言語のルールを真に理解し、システムを動かしているものに共感するには、人間である必要があると考えてきました。 私たちは、人間 (言語学者) がタスクにもたらす知識と推論の種類をエミュレートできるかどうかを確認したかったのです。」 MIT の Adam Albright 氏はニュースリリースで次のように述べています。. これは非常に初期の研究ですが、明確な指示がなくても AI モデルが微妙なルールや隠れたルールを「理解」できることを示しているという点で有望です。
しかし、この実験は、AI 研究における重要な未解決の問題、つまり、言語モデルが有毒で差別的または誤解を招くような言語を出力するのをどのように防止するかという問題に直接対処するものではありませんでした。 新しい 仕事 ディープマインドから します これに取り組み、言語モデルを人間の価値観に合わせるという問題に哲学的なアプローチをとります。
ラボの研究者は、より優れた言語モデルへの「万能」な道はないと考えています。モデルは、展開されるコンテキストに応じてさまざまな特性を具現化する必要があるからです。 たとえば、科学研究を支援するように設計されたモデルは、理想的には真実の陳述のみを行いますが、公の討論でモデレーターの役割を果たすエージェントは、寛容、礼儀正しさ、敬意などの価値を行使します。
では、これらの価値を言語モデルにどのように浸透させることができるのでしょうか? DeepMind の共著者は、1 つの特定の方法を提案していません。 代わりに、モデルが呼び出すプロセスを介して、時間の経過とともに、より「堅牢な」「敬意のある」会話を育むことができることを示唆しています。 コンテキスト構築 と 解明. 共著者は次のように説明しています。人間の話し手。」
質問に答える Google の LaMDA 言語モデル。
言語モデルを調整するための最も有望な方法を検討するには、膨大な時間とリソースが必要です — 財政的およびその他の方法で。 しかし、言語を超えた分野、特に科学分野では、そう長くは続かないかもしれません。シカゴ大学、アルゴンヌ国立研究所、およびMIT。
NSF 助成金を利用して、受賞者は「モデル ガーデン」、つまり物理学、数学、化学などの分野の問題を解決するために設計された AI モデルのリポジトリと呼ぶものを構築することを計画しています。 リポジトリは、モデルをデータやコンピューティング リソース、自動化されたテストやスクリーニングとリンクして精度を検証し、理想的には、科学研究者が自分の研究でツールをテストして展開することをより簡単にします。
「ユーザーは [model] このプロジェクトに関与した Globus Labs のデータ サイエンス研究者である Ben Blaiszik 氏は、次のように述べています。 言った プレスリリースで。 「彼らはモデルを引用し、モデルについて学び、著者に連絡することができ、ウェブ環境、リーダーシップ コンピューティング施設、または自分のコンピューターでモデルを自分自身で呼び出すことができます。」
一方、ロボティクスの分野では、研究者は AI モデルのプラットフォームをソフトウェアではなくハードウェア (正確にはニューロモルフィック ハードウェア) で構築しています。 インテル 請求 実験的な Loihi チップの最新世代により、オブジェクト認識モデルは、モデルが CPU で実行されている場合よりも最大 175 分の 1 の電力で、これまでに見たことのないオブジェクトを識別することを「学習」できます。

インテルの実験的ニューロモーフィック チップの 1 つを搭載したヒューマノイド ロボット。
ニューロモルフィック システムは、神経系の生物学的構造を模倣しようとします。 従来の機械学習システムは高速または電力効率に優れていますが、ニューロモルフィック システムは、ノードを使用して情報を処理し、ノード間の接続をアナログ回路を使用して電気信号を転送することにより、速度と効率の両方を実現します。 システムは、ノード間を流れる電力量を調整して、各ノードが処理を実行できるようにしますが、必要な場合のみです。
インテルなどは、ニューロモーフィック コンピューティングがロジスティクスに応用できると考えています。たとえば、製造プロセスを支援するために構築されたロボットに電力を供給します。 現時点では理論上の話です — ニューロモーフィック コンピューティングには欠点があります — しかし、おそらくいつの日か、そのビジョンが実現するでしょう。

画像クレジット: ディープマインド
より現実に近いのは、DeepMind の最近の 仕事 「具現化された知性」、または人間や動物の動きを使用して、ロボットにボールをドリブルしたり、箱を運んだり、サッカーをしたりすることを教えます。 ラボの研究者は、人間や動物が装着したモーション トラッカーからのデータを記録するためのセットアップを考案しました。このデータから、AI システムは円を描くように歩く方法など、新しいアクションを完了する方法を推測することを学習しました。 研究者は、このアプローチが現実世界のロボットにうまく変換されたと主張しています。たとえば、4 本足のロボットがボールをドリブルしながら犬のように歩くことができます。
偶然にも、マイクロソフトは今年の夏に リリース 人間のように歩くことができるロボットの研究に拍車をかけることを目的としたモーション キャプチャ データのライブラリ。 ライブラリには MoCapAct と呼ばれるモーション キャプチャ クリップが含まれており、他のデータと組み合わせて使用すると、少なくともシミュレーションでは機敏な二足歩行ロボットを作成できます。
「[Creating this data set] 多くの GPU 搭載で 50 年に相当する時間がかかりました [servers] … MoCapAct が他の研究者にとって計算上のハードルを取り除くことの証です」と、この研究の共著者はブログ投稿に書いています。 「コミュニティが私たちのデータセットを基に構築し、ヒューマノイド ロボットの制御に関する素晴らしい研究に取り組んでくれることを願っています。」
科学論文の査読は非常に貴重な人間の仕事であり、AI がそれを引き継ぐ可能性は低いですが、査読が実際に役立つかどうかを確認するのに役立つ可能性はあります。 スイスの研究グループは、 ピアレビューのモデルベース評価、そして彼らの初期の結果はまちまちです – 良い意味で。 明らかな良い方法や悪い方法や傾向はなく、出版物の影響評価は、レビューが完全であるか有用であるかを予測していないようでした. レビューの質はさまざまですが、たとえば、主要なジャーナル以外のすべての場所で良いレビューが体系的に欠如することは望ましくないため、それは問題ありません。 彼らの仕事は進行中です。
最後に、この分野のクリエイティビティに関心のある方のために、 これは Karen X. Cheng による個人的なプロジェクトです これは、ちょっとした工夫と努力を AI と組み合わせて、真に独創的なものを生み出す方法を示しています。