より小さく、より優れたロボットを作成するための競争は熾烈なものであり、コーネル大学は現在、人間の髪の毛に座るのに十分小さいボットのセットで先頭に立っていますが、力として光だけを使用して自力で動くことができますソース。
さて、数か月前に同じように小さなマシンが 1 セント硬貨の縁に誇らしげに座っていたことを覚えているかもしれません。 確かに小さいですが、それをロボットと呼ぶのは正確ではありません。 確かに小さな機械でしたが、加熱と冷却を繰り返すことで脚が伸びたり縮んだりします。
の アントボット、マイケル・レイノルズが率いる研究室がそれらを呼んでいるように、実際にはアリのサイズについてです に アリ — ペニーパーチングクラブのものよりもさらに小さい. また、ロボット、または少なくともモバイル電子機器と見なされるものにはるかに近い. しかし、ほとんどの以前のシステムとは異なり、ワイヤーは必要ありません。
Antbots は 3 つの主要なシステムで構成されています: 光を電力として受け入れる太陽電池、その電力を制御および指示するための小さな集積回路、およびそれ自体をすくい上げるために使用するヒンジ付きの脚のセットです。
このマシンを「自律型」と呼ぶのは少し寛大ですが、動きを調整するパルスレーザーや無線信号など、直接の注意や入力なしで動作できることを許可すれば、それで十分です. それは力だけを必要とするという点で自律的に動きますが、知性は必要としません。それには単純すぎるのです。
さまざまな歩行をどのように使用できるかを示すために、他のいくつかの設計が構築されました。また、単一のコマンド (基本的には高速/低速切り替え) を受け入れることができる、わずかに大きく、より機能的な「ドッグボット」も作成されました。 ロボットの知性は、電子機器の規模によって直接制限されます。より複雑なロジックを実行するには、電子機器が十分に収まりません。
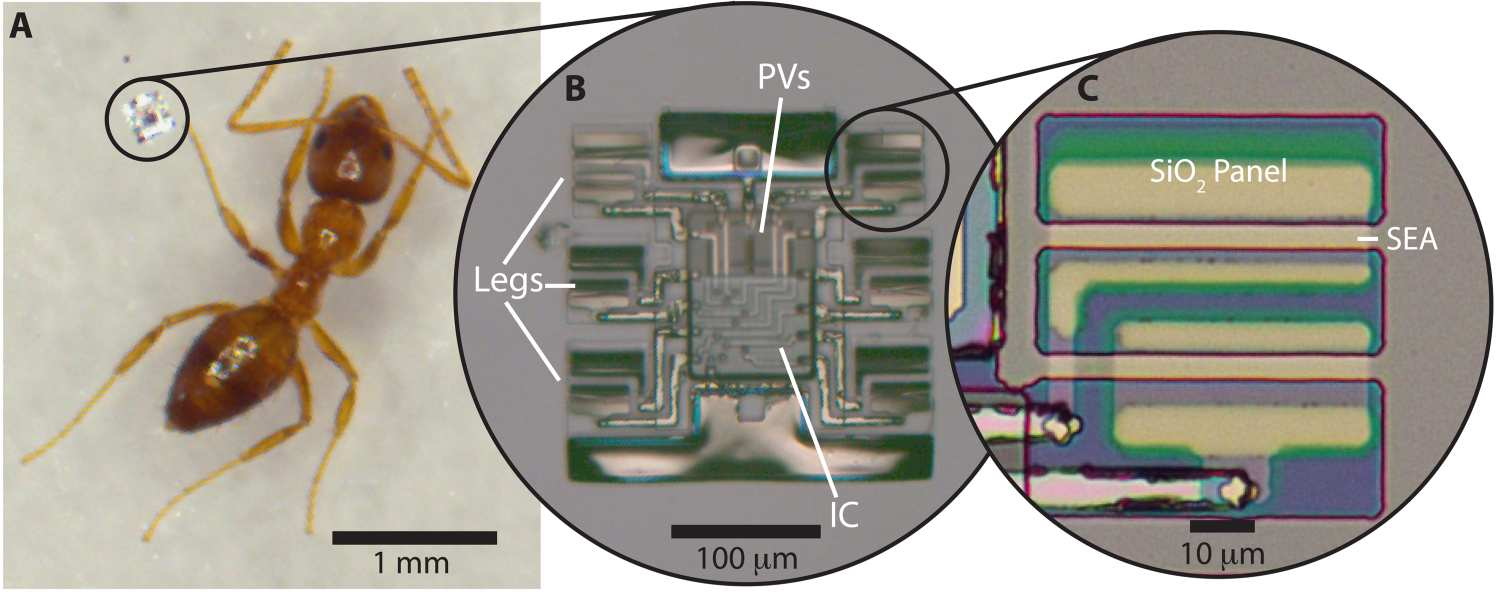
アリの横にある Antbot の画像で、そのコンポーネントがマークされています。
しかし、チームはかなり大規模なシリコン製造プロセスを使用しました.180ナノメートルで、現在のチップは10nm未満のプロセスを使用して作成されています. 回路のサイズを 1 桁縮小することで、ロボットを小型化するか、ロボットの知性を同程度に倍増させることができます。
アプリケーションは、環境のクリーンアップと監視から、薬物の標的送達、細胞の監視または刺激、および顕微鏡手術にまで及びます。 これらすべてのアプリケーションにおいて、環境を感知して応答し、自律的に動作するためのオンボード制御システムを備えたロボットは、注目に値する利点を提供し、私たちの周りの世界で前向きな結果をもたらす能力を備えたユビキタスなスマート微細ロボットの舞台を設定します.
このプロジェクトの詳細については、以下のビデオ、または本日 Science Robotics 誌に掲載された論文をご覧ください。